Lab 1
Lab 2
Lab 3
Lab 4
Lab 5
Lab 6
Lab 7
Lab 8
Lab 9
Lab 10
Lab 11
Lab 12
Lab 1
Goal
The purpose of this lab was to get acquainted with the SparkFun Artemis Nano and with our custom Ubuntu VM.
Materials
- 1 SparkFun Artemis RedBoard Nano
- 1 USB A-C cable
- 1 lithium-polymer rechargeable battery
- 1 laptop
Procedure
The IDE
Installed Arduino from the Arch Linux repos. Only the IDE supports Artemis boards. arduino-avr-core is required for the IDE.
Installed the Arduino core in the IDE:
- Open Tools > Board > Boards Manager in the IDE
- Search for apollo3
- Choose version 1.1.2 in the drop-down
- Click Install (this took several minutes)
Chose the “SparkFun RedBoard Artemis Nano” as the board.
Testing
Uploaded four example sketches to test various parts of the board:
- Blink (from built-in examples)
- Example2_Serial (from SparkFun Apollo3 examples)
- Example4_analogRead (SparkFun)
- Example1_Microphone (SparkFun)
Also modified Example1_Microphone to blink the built-in LED when whistling.
Results
IDE
One pitfall was accessing the COM port, as Linux doesn’t give users read-write permission by default. The permanent fix was a custom udev rule:
SUBSYSTEM=="tty" ATTRS{vendor}=="0x8086" ATTRS{subsystem_device}=="0x0740" MODE="0666"
Note that the exact requirements for this rule depend on the computer and the distro.
Testing
The Blink example worked, blinking the blue LED labeled 19.
The Serial example both input and output text via the USB serial connection.
The analogRead sketch read temperature values which noticeably rose as I held my warm thumb against the device.
The Microphone example showed that the loudest frequency doubled when I whistled an octave, indicating that the microphone is working well.
I added two pieces of code to the Microphone example to make it blink the LED when I whistle.
In void setup():
pinMode(LED_BUILTIN,OUTPUT);
In void loop():
if(ui32LoudestFrequency>800 && ui32LoudestFrequency<2000)
digitalWrite(LED_BUILTIN,HIGH); // blink the LED when frequency is in whistling range
else
digitalWrite(LED_BUILTIN,LOW); // and not otherwise
This worked well. (It also picked up my squeaky chair or tapping on my desk.)
While the Artemis Nano was plugged into my computer, plugging the battery in lit the yellow CHG light.
I commented out all the serial lines of code so that the board would not attempt to establish serial communication with my computer. Then, the board would recognize my whistle on battery too.
Lab 2
Goal
Materials
- 1 Artemis Nano
- 1 USB dongle
- 1 USB A-C cable
- 1 computer running the Ubuntu 18 VM
Procedure
Setup
Downloaded the distribution code.
(Re)installed bleak using pip install bleak at the command line.
Downloaded the sketch ECE_4960_robot to the Artemis and opened the serial monitor at 115200 baud.
Entered the folder generated by extracting the ZIP. Ran ./main.py twice while the Artemis Nano was powered on to discover the board. Manually cached the Artemis’ MAC address to settings.py.
Ping Test
Commented out pass and uncommented # await theRobot.ping() under async def myRobot.Tasks() in main.py. Ran ./main.py again while the Arduino serial monitor was still open. Copied the data from the terminal; pasted into a spreadsheet and set space as the delimiter; generated statistics.
Request Float
Modified case REQ_FLOAT in the Arduino sketch ECE_4960_robot.ino as follows:
case REQ_FLOAT:
Serial.println("Going to send a float");
res_cmd->command_type = GIVE_FLOAT;
res_cmd->length = 6;
((float *) res_cmd->data)[0] = (float) 2.71828; // send e
amdtpsSendData((uint8_t *)res_cmd, res_cmd->length);
break;
In main.py, commented await theRobot.ping() and uncommented await theRobot.sendCommand(Commands.REQ_FLOAT). Reran main.py and received the floating-point value of e.
Bytestream Test
In main.py, commented await theRobot.sendCommand(Commands.REQ_FLOAT) and uncommented await theRobot.testByteStream(25). Added the following code to ECE_4960_robot.ino within if (bytestream_active):
Serial.printf("Stream %d after %3.1f ms latency\n", bytestream_active, (micros() - finish)*0.001);
int numInts = 3; // how many integers will fit in this stream
bytestreamCount++; // we are sending one bytestream now
res_cmd->command_type = BYTESTREAM_TX;
// Two bytes for command_type and for length;
res_cmd->length=2+bytestream_active*numInts; // then 4 bytes for each uint32_t and 8 for each uint64_t
start=micros();
uint32_t integer32 = 0xffffffff; // different values to indicate whether we're getting a 32-bit
uint64_t integer64 = 0xffffffffffffffff; // or a 64-bit number
uint32_t *p32; // pointers to the appropriate data types
uint64_t *p64;
switch(bytestream_active){
case 4: //asked for a 4-byte number!
p32=(uint32_t*) res_cmd->data;
for(int i=0; i<numInts-2; i++){ // the -2 is so the last two values can be the time and the count
memcpy(p32, &integer32, sizeof(integer32));
p32++; // move 4 bits down the array
}
memcpy(p32, &bytestreamCount, sizeof(bytestreamCount));
p32++;
memcpy(p32, &start, sizeof(start));
break;
case 8: //asked for an 8-byte number!
default: // the default is to send a 64-bit (8-byte) array
p64=(uint64_t*) res_cmd->data;
for(int i=0; i<numInts-2; i++){
memcpy(p64, &integer64, sizeof(integer64));
p64++; // move 8 bits down the array
}
bytestreamCount64 = (uint64_t) bytestreamCount;
memcpy(p64, &bytestreamCount64, sizeof(bytestreamCount));
p64++;
memcpy(p64, &start, sizeof(start));
break;
}
amdtpsSendData((uint8_t *)res_cmd, res_cmd->length);
finish=micros();
Serial.printf("Finished sending bytestream after %u microseconds\n",finish-start);
where start and finish were defined as global variables and finish was initialized to zero.
Repurposed bytestream_active to tell the Artemis how large an integer to send; if bytestream_active==4 then the Artemis sends back an array of 32-bit (4-byte) integers, and if bytestream_active==8 then the Artemis sends back 64-bit integers. These maximum values were confirmed by setting integer32=0xffffffff and integer64=0xffffffffffffffff as the maximum values that can be sent. Because of this usage, changed await theRobot.testByteStream(25) to await theRobot.testByteStream(4) in the 32-bit case or await theRobot.testByteStream(8) for the 64-bit case.
Added the following code to main.py within if code==Commands.BYTESTREAM_TX.value:
# dataUP = unpack("<III",data) # for 3 32-bit numbers
dataUP = unpack("<QQQ", data) # for 3 64-bit numbers
# print(f"Received {length} bytes of data")
print(dataUP)
Results
Ping Test
The Bluetooth icon in the statusbar does not appear until main.py is run. This indicates that the Python script, rather than the Ubuntu Bluetooth wizard, is establishing the connection.
The ping latency followed this histogram:
Using the setting "OutputRawData": True in settings.py showed me that returning a ping sends 96 bytes of data, all zeroes. Thus, the transfer rate followed this histogram:
Most of the “rate” in this case is the latency of returning pings. From the Artemis side, I measured the average time between pings as 160.0 ms. The average total RTT as measured by the Python script was 159.3 ms. The Artemis sends data very quickly.
Request Float
The traceback at the bottom occurred because I stopped the program with Ctrl+C.
Note that although the floating-point value was 2.71828, there were additional random digits. This means that floats cannot be compared like if( float1 == float2 ), but rather if( abs(float1-float2) < tolerance ).
Bytestream Test
32-bit Stream
The Python script indicates that it receives 14 bytes of data in each packet. The mean transfer rate is 963 bytes/second. Note this is the average over the packets which were received; only 65% of the packets made it to the computer.
64-bit Stream
The Python script indicates that it receives 26 bytes of data in each packet. The mean transfer rate is 1.46 KB/second. Note this is the average over the packets which were received; only 22% of the packets made it to the computer.
Lessons Learned
As I experienced, and as this SuperUser post points out, users must be part of the vboxusers group on the host machine, or else no USB devices are accessible from VirtualBox. This and other issues were solved when I did the following, in order:
- Add my user to the host machine’s
vboxusersgroup. - In the VirtualBox settings, ensure
Enable USB Controlleris checked. - Connect the Bluetooth USB dongle.
- Start the VM.
- In the VirtualBox menu bar, mouse to Devices > USB and check
Broadcom Corp 20702A0. - Run
main.pyin the CLI.
Adjusting the Ubuntu Bluetooth settings was unnecessary and caused issues. The USB dongle is more reliable than my built-in BLE radio.
Another surprise I shouldn’t have experienced was that the code didn’t run when I executed python main.py. I noted that the file was executable and began with #!/usr/bin/env python3. When I ran it as a script, it worked perfectly. python was mapped to python2.7 and not python3. Always check versions.
I found that the Python code “cares” what length is sent with the message. The length must match the format string; and the code stops parsing data after length bytes.
Lastly, the shorter the data packets were, the more likely they were to reach their destination.
See my code and data for Lab 2 here.
Lab 3
Materials Used
- Fancy RC Amphibious Stunt car with remote
- 2 NiCd rechargeable batteries with USB charger
- 2 AA batteries
- Screwdriver
- Ruler / measuring tape
- Timer (app)
- GPS (app)
- Laptop running Ubuntu 18.04 VM with ROS Melodic Morenia
Procedure
Physical Robot
Charged each NiCd battery about 8-9 hours before first use (or until the red light on the USB charger stopped flashing.) Inserted NiCd battery into robot and two rechargeable AA batteries into the remote.
Collected various measurements using the available environment, a ruler, and a timer. For clocking speed, used a GPS app to get distance measurements.
Simulation
Installed ros-melodic-rosmon.
Downloaded the lab 3 base code from Box into the folder shared between the host and the VM. Started the VM; extracted the archive; entered the folder extracted from the archive; and ran ./setup.sh.
Closed and reopened the terminal emulator, per the instructions.
Started lab3-manager, which was now aliased as shown here. Hit a to enter the Node Actions menu; then hit s to start a simulator.
Opened another terminal window and ran robot-keyboard-teleop to allow me to control the simulation.
Played the game and made the measurements below.
Results and Lessons Learned
Physical Robot
This video is courtesy of my apartment-mate Ben Hopkins.
The wheelbase is 4 in = 10.5 cm wide and 3.25 in = 8 cm long (measuring from the center of the wheels.) This measurement is useful to determine skid-steering quality.
Unless stated otherwise, the following tests were done on a flat surface.
Manual Control
How difficult it is to drive the robot manually helps me understand the difficulty of controlling it algorithmically.
- The three speed settings had significantly different effects. It was virtually impossible to flip when traveling slow; but at max speed I could hardly start without flipping. The top speed and the default speed were nearly the same.
- The robot can turn in place quite predictably; however, it requires a lot of power to skid the wheels, and when the battery is low, it can no longer turn in place.
- Long arc turns are difficult not to do. I could hardly drive straight even if the joysticks were maxed out. In code, driving straight will require a feedback loop.
Inertial Measurements
How quickly the robot accelerates and decelerates tells me a lot about the robot’s power-to-weight ratio. I don’t have a scale, but I can calculate its mass (at least in terms of its motor torque.)
- Acceleration: 6-8 feet to get to full speed. 6-8 feet to coast to a stop. 2-2.5 seconds to accelerate to full speed.
- Can stop quickly by reversing with slow button (2 feet)
- These numbers stayed relatively constant as the battery drained; but the maximum speed decreased.
- Average max speed at full (ish) battery: 12 ft/s = 3.5 m/s = 8 mi/h
- These measurements were the same whether the robot drove forward or backward.
Gravitational Measurements
OK, so I know the robot’s motors are strong enough to accelerate and decelerate it quickly. How strong is that? Where is the weight in the robot?
- The robot is quite stable – it has to tilt around 75° before it flips.
- The robot is also somewhat topheavy - it flips if it accelerates or stops too suddenly.
- The motors were not very strong – it was sometimes difficult to climb hills. It could climb a 45° slope with a good battery, but it slowed significantly. Rough terrain also slowed it down since it had to climb over many short slopes.
Frictional Measurements
- The robot turned about its center predictably on a flat surface, but slopes made a big difference.
- The robot’s turn radius was predictable at a given battery level, speed, and type of terrain. Little rocks, initial speed, battery level, and slope all made a big difference.
- Average maximum rotational speed when turning in place: 75 rpm = 7.9 rad/s
- I noticed no differences between driving on flat (hard) carpet, concrete, and asphalt.
Other Measurements
- The range was quite good, 250+ feet line-of-sight.
- I could drive the robot around and under cars. The signal can go around at least 10 cars in a parking lot.
- On the first and second runs, the battery lasted 35 min (when the robot was moving about 1/2 the time.)
Simulation
- The robot doesn’t seem to have a minimum speed. I can reduce the input speed to 0.01 and less and still it moves (albeit around 1 square per minute.) It seems to have no maximum speed either.
- The same is true for angular speed.
- I could accelerate nearly instantly and reverse direction nearly instantly; the only limiting factor seems to be the frame rate. The time between 1x reverse and 1x forward is the same as between 3x reverse and 3x forward, or 3x forward and 3x reverse, etc.
- When I hit the wall, the robot did not bounce, flip, etc; the simulation paused and showed a warning triangle sign in the place of the robot until I backed away from the wall.
- I could grab and drag the robot using the mouse; as soon as I put the robot down, it resumed motion in the same direction as it was moving before. However, I couldn’t both drag/pan and steer at once; the keyboard control only works when the terminal window running
robot-keyboard-teleophas focus.
Click here to see my data for Lab 3.
Lab 4
Materials Used
- Sparkfun Artemis RedBoard Nano
- USB A-C cable
- SparkFun Serial Controlled Motor Driver (SCMD) module (with no jumpers soldered)
- SparkFun Qwiic (I²C) connector cable
- Fancy RC Amphibious Stunt Car
- 4.8V NiCd rechargeable battery
- 3.7V Li-ion rechargeable battery
Tools and Software
- Laptop with Ubuntu 18.04 VM and Arduino IDE
- Wire cutters (wire stripper would be ideal; scissors also work)
- Small Phillips-head screwdriver (optional)
- Small flat-head screwdriver (required for clamping wires in SCMD)
- Electrical tape
- Duct tape (optional)
Procedure
Physical Robot
Reviewed documentation. Removed the aesthetic cover and the motor cover; cut the wires to the motors right at the connectors; stripped about 3/8” of insulation; and connected them to the SCMD. Cut the battery wires close to the control board, stripped the ends, and connected them to the SCMD.
In Arduino IDE, installed the Serial Controlled Motor Driver library version 1.0.4 (Tools -> Manage Libraries -> search for “SCMD”.) Loaded Example1_Wire (from the newly installed SCMD library); changed the I²C device address to 0x5D; and ran it. It spun the two wheel motors. Used this command: Serial.printf("Address %d\n",i); within the for loop to tell me what the motor addresses were. Wrote code to spin the motors and found the minimum speed that made the wheels turn.
Removed the RC control board from the robot; pushed the SCMD into its place; and reattached the top cover. The Qwiic wire came out between the cover and the case, like this:

Wrote code to make the robot drive in a straight line (using a linear scaling calibration) and took a video.
Simulation
Downloaded the Lab 4 Base Code from Box into the folder shared between the host and the VM. In the VM, opened a terminal window; entered the shared folder; extracted the base code; and ran setup.sh in the appropriate folder.
Closed and reopened terminal window. Ran lab4-manager and followed the instructions to open a simulator window.
Opened another terminal window (Ctrl+Alt+T). Entered the directory /home/artemis/catkin_ws/src/lab4/scripts and ran jupyter lab.
In the resulting Firefox window, opened the Jupyter notebook lab4.ipynb. Followed the instructions and saved the lab notebook.
Results and Notes
Physical Robot
Running the example code, when the motor driver was plugged in, gave the result
I2C device found at address 0x5D !
Not surprisingly, the addresses of the wheel motors were 0 and 1 (since the SCMD drives up to two motors.)
I could not fit the Qwiic connector through the start button hole.
The minimum power at which I could make the wheels spin was not the same on either side. On the left (address 0) it was about 46; on the right (address 1) it was about 50. These numbers seem to change as the battery level changes.
I reasoned that the friction in the wheels is a constant force, not a velocity-dependent one, so the frictional resistance should be a constant offset. This seemed to to work; at low power, I needed +4 power on the right side, and the same should be true at higher power levels. However, the wheels were not exactly the same size, as evidenced by the fact that the robot drove in a curve. By trial and error, I scaled the left side up by 8% to compensate for this, and then the robot drove straighter.
When I assembled the robot, I found that the electrical tape wasn’t sticky enough to hold the Artemis Nano onto the robot case; and zip ties would prevent me from replacing the battery. So I used duct tape instead.
Below is a video of a straight line (triggered by a whistle).
Also, note that I could not set to recognize higher-frequency whistles, or else the robot would pick up the sound of its own motors and keep on driving.
The next two videos show two of my attempts to make it drive in a triangle, using the following code (with different wait times):
for(int i=0; i<3; i++){
myMotorDriver.setDrive( right, 1, power); // 1 for forward
myMotorDriver.setDrive( left, 0, calib*power+offset); // left side is reversed
int t = millis();
while (millis()-t < 350){ // Wait for a specified time, but keep updating the PDM data
myPDM.getData(pdmDataBuffer, pdmDataBufferSize);
}
// Coast to a stop
myMotorDriver.setDrive( left, 1, 0); // Set both sides to zero
myMotorDriver.setDrive( right, 1, 0);
t = millis();
while (millis()-t < 500){ // Wait for a specified time, but keep updating the PDM data
myPDM.getData(pdmDataBuffer, pdmDataBufferSize);
}
// Spin in place
myMotorDriver.setDrive( right, 1, power); // 1 for forward
myMotorDriver.setDrive( left, 1, calib*power+offset); // left side is NOT reversed since we're spinning!
t = millis();
while (millis()-t < 290){ // Wait for a specified time, but keep updating the PDM data
myPDM.getData(pdmDataBuffer, pdmDataBufferSize);
}
// Coast to a stop
myMotorDriver.setDrive( left, 1, 0); // Set both sides to zero
myMotorDriver.setDrive( right, 1, 0);
t = millis();
while (millis()-t < 500){ // Wait for a specified time, but keep updating the PDM data
myPDM.getData(pdmDataBuffer, pdmDataBufferSize);
}
}
The open-loop control is very sensitive to
- Timing (the difference between the first and the second videos is 20 ms)
- Surfaces (hardly turns on carpet; spins easily on tile)
- Battery level (in less than a minute, the robot would no longer turn enough)
Simulation
artemis@artemis-VirtualBox:~$ cd Shared
artemis@artemis-VirtualBox:~/Shared$ ls
...
lab4_base_code.zip
...
artemis@artemis-VirtualBox:~/Shared$ unzip lab4_base_code.zip
Archive: lab4_base_code.zip
creating: lab4_base_code/
inflating: lab4_base_code/bash_aliases
inflating: lab4_base_code/setup.sh
inflating: lab4_base_code/lab4.zip
artemis@artemis-VirtualBox:~/Shared$ ls
...
lab4_base_code
lab4_base_code.zip
...
artemis@artemis-VirtualBox:~/Shared$ cd ./lab4_base_code/
artemis@artemis-VirtualBox:~/Shared/lab4_base_code$ ls
bash_aliases lab4.zip setup.sh
artemis@artemis-VirtualBox:~/Shared/lab4_base_code$ ./setup.sh
> Log output written to: /home/artemis/Shared/lab4_base_code/output_lab4.log
> Lab Work Directory: /home/artemis/catkin_ws/src/lab4/scripts/
Validating...
Step 1/3: Extracting Files to: /home/artemis/catkin_ws/src/
Step 2/3: Setting up commands
Step 3/3: Compiling Project
Successfully compiled lab.
NOTE: Make sure you close all terminals after this message.
artemis@artemis-VirtualBox:~/Shared/lab4_base_code$ exit
My working open-loop square was as follows:
# Your code goes here
for i in range(4):
robot.set_vel(1,0)
time.sleep(0.5)
robot.set_vel(0,1)
time.sleep(1.625)
robot.set_vel(0,0)
It was easy to tune the timing so that the robot predictably drove in a perfect square, like this:
See the rest of my code, and the Jupyter notebook, here. Also see additional things I learned and notes in the Other Lessons Learned page.
Lab 5
Background
Materials
Components
- SparkFun Artemis RedBoard Nano
- USB A-C cable
- SparkFun 4m time-of-flight sensor (VL53L1X)
- SparkFun 20cm proximity sensor (VCNL4040)
- SparkFun Serial Controlled Motor Driver (SCMD) module (with no jumpers soldered)
- SparkFun Qwiic (I²C) connector cable
- Fancy RC Amphibious Stunt Car
- 4.8V NiCd rechargeable battery
- 3.7V Li-ion rechargeable battery
- Boxes and targets of various sizes
Tools and Software
- Laptop with Ubuntu 18.04 VM and Arduino IDE
- Wire cutters (scissors also work)
- Small Phillips-head screwdriver (may substitute flathead)
- Ruler (or printed graph paper)
- Gray target (printed; 17% dark)
- Electrical tape
- Double-sided tape or sticky pad
Prelab
The two sensors are quite different. The long-range ToF sensor (VL53L1X) has a field of view of about 15 degrees, and it has a much longer range. It can safely be put near the ground without seeing the ground; it could miss obstacles right in front of the wheels since the detection cone is very narrow near the robot. Outside of its detection cone, the prox sensor (VCNL4040) has a wider field of view (±20° = 40°) so it may be placed right at the center of the robot and hopefully it will pick up the obstacles close and to the side, which would be missed by the VL53L1X. Also note that the VCNL4040 maxes out within the range of the VL53L1X, so there is some overlap where the two sensors’ readings may be compared.
These two distance sensors exemplify the main types of infrared ranging sensors.
- Infrared intensity measurement: This uses the inverse-square law to determine the distance to an object. However, the coefficient of the inverse-square law varies widely with color, and this intensity is also extremely sensitive to ambient light. The VCNL4040 uses intensity measurement.
- Infrared time-of-flight (ToF): This works like RADAR, by measuring the elapsed time for the optical signal to bounce back. It is more immune to noise than intensity measurement, but it is still vulnerable to interference from ambient light.
- Infrared angle measurement: This uses the angle (sometimes in conjunction with ToF) of the returned light to triangulate the distance. It eliminates some more of the problems of ToF, but is again sensitive to ambient light and refraction / angle of the reflector. The VL53L1X uses both angle and ToF measurement.
Other available ranging sensors include SONAR (used in submarines and bats ☺) and RADAR (used in aircraft.) Since the width of a diffracted beam decreases with increasing wavelength, both of these require some sort of beam-steering to get a sufficiently narrow beam to see only what’s in front of the robot. IR ranging is thus simpler and usually cheaper to use.
Procedure
Physical Robot
Skimmed the documentation for the VCNL4040 and the SparkFun repo and hookup guide. Noted that the default I²C address of the sensor is 0x60.
In the Arduino IDE, installed the SparkFun VCNL4040 Arduino Library using Tools > Manage Libraries.
Reviewed the datasheet and the manual for the VL53L1X.
Ran Example1_Wire (File > Examples > Wire) to find all I²C addresses. Ran Example4_AllReadings (File > Examples > SparkFun VCNL4040 Proximity Sensor Library) to measure data. Tested on four five different targets under various conditions. Recorded data once the reading stabilized (after about 5s.) When the data fluctuated wildly (e.g. at very close ranges) took the median and rounded.
In the Arduino IDE, installed the SparkFun VL53L1X Arduino Library using Tools > Manage Libraries. Ran Example1_Wire again to find the I²C address of the time-of-flight sensor. Tested ranging once and saw that it needed calibration. Calibrated using Example7_Calibration (File > Examples > SparkFun VL53L1X Distance Sensor). Adjusted offset accordingly in Example1_ReadDistance and tested ranging on several targets with the lights on and with the lights off.
Wrote and tested an obstacle-avoidance program.
Simulation
Downloaded and extracted the lab 5 base code. Entered the directory and ran setup.sh. Closed the terminal window.
Entered the directory ~/catkin_ws/src/lab5/scripts/. Ran jupyter lab; opened `lab5.ipynb’; followed the instructions in the Jupyter Notebook.
Results and Notes
Physical Robot
Unknown error at address 0x5D
Unknown error at address 0x5E
Unknown error at address 0x5F
I2C device found at address 0x60 !
Unknown error at address 0x61
Unknown error at address 0x62
Unknown error at address 0x63
The VCNL4040 indeed had the default I²C address of 0x60.
When testing the ranging for both sensors, I found it useful to tape the sensor to a fixed object, as suggested in the instructions. For me, it was a screwdriver case.
 Figure 1. Ranging test with VCNL4040.
Figure 1. Ranging test with VCNL4040.
When running Example4_AllReadings, I noticed that the sensor readings took 3-5 seconds to stabilize. It seems like there is a rolling-average filter or an integrator in the sensor. I was also a bit surprised since the “prox reading” wasn’t a range estimate (like it is on ultrasonic rangefinders), but an intensity which scales with the inverse-square law. After gathering data from several surfaces, I found that my data looked much like the screenshot shown in the lab instructions.
I was pleasantly surprised that the VCNL4040 proximity ranges were about the same whether I had the lights on or off, and even if I shone a flashlight on the sensor. Both the shadow of the target and the red LED on the board significantly affected brightness readings as the sensor approached the target, so I recorded brightness at 20cm away where these had less effect.
 Figure 2. Ranging test with desk leg and VCNL4040.
Figure 2. Ranging test with desk leg and VCNL4040.
With the desk leg, I noticed that the readings were much worse than they were for other objects. At first I assumed it was the reflectivity of the surface, but I noted three other things:
- The graph paper was rumpled. Was the sensor seeing the paper instead? Turning the sensor sideways (so it completely missed the leg) gave approximately the same readings. Maybe it was seeing the paper.
- The reading varied significantly when the sensor moved side to side. Was it the width?
- The desk leg wasn’t parallel to the sensor, and I noticed that angles mattered in the case of the plywood too. But, holding the sensor off the ground and pointing it directly at the angled leg didn’t make much difference.
I repeated a few measurements of the desk leg with a ruler instead of the graph paper, and achieved the same results.
I also added an additional measurement of the box on its side, ruling out the possibility that it was the object’s width and not its surface texture.
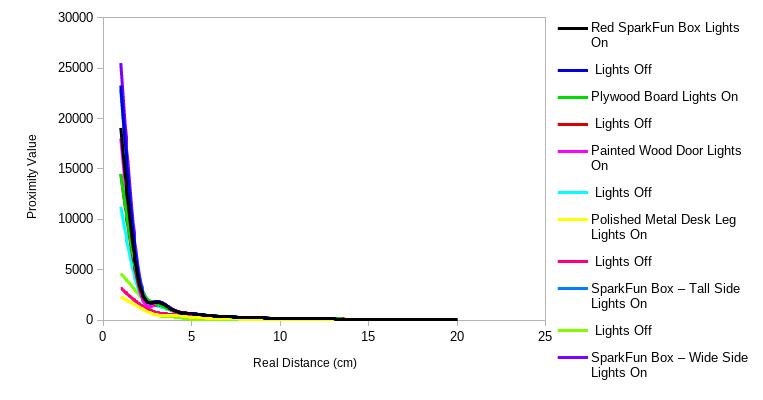 Figure 3. Prox data vs. real range.
Figure 3. Prox data vs. real range.
As the SparkFun hookup guide predicted, the I²C address of the ToF sensor was 0x29.
Unknown error at address 0x26
Unknown error at address 0x27
Unknown error at address 0x28
I2C device found at address 0x29 !
Unknown error at address 0x2A
Unknown error at address 0x2B
Unknown error at address 0x2C
My first reading at 20cm distance showed 140cm instead, so I tried to run the Example7_Calibration. However, this code didn’t work. I traced the problem to the line while (!distanceSensor.checkForDataReady()), as the loop kept running forever and the sensor was never ready. Comparing this example code to Example1_ReadDistance (which worked) I noticed that distanceSensor.startRanging() had never been called. Adding this line to the example gave me successful (and repeatable) calibration.
*****************************************************************************************************
Offset calibration
Place a light grey (17 % gray) target at a distance of 140mm in front of the VL53L1X sensor.
The calibration will start 5 seconds after a distance below 10 cm was detected for 1 second.
Use the resulting offset distance as parameter for the setOffset() function called after begin().
*****************************************************************************************************
Sensor online!
Distance below 10cm detected for more than a second, start offset calibration in 5 seconds
Result of offset calibration. RealDistance - MeasuredDistance=37 mm
Then, I slightly modified the example distance-reading code as follows:
In void setup(), added a line distanceSensor.setOffset(37);
In void loop(), added code to time each range measurement and to print the time to the serial output.
When I tried different timing budgets, I didn’t see much improvement in precision when using timing budgets over 60 ms in short-range mode or over 180 ms in long-range mode. These maximum timing budgets seemed to be the best compromise between accuracy and speed; adding more doesn’t gain much accuracy, and reducing more doesn’t gain much speed.
I noticed that, as the datasheet said, the ranging in ambient light was significantly more precise when I used short mode. The same seemed to be true in the dark, however. My data, plotted below, shows these trends. Note that some “waves” in the graphs are repeated for all surfaces.
 Figure 3. Ranging setup with plywood.
Figure 3. Ranging setup with plywood.
The ToF sensor was much less sensitive to the width of the object being detected; it made no difference what the orientation of the box was. It was somewhat sensitive to the angle of the plywood board, but only at short distances (where the VCNL4040 might be a better choice.)
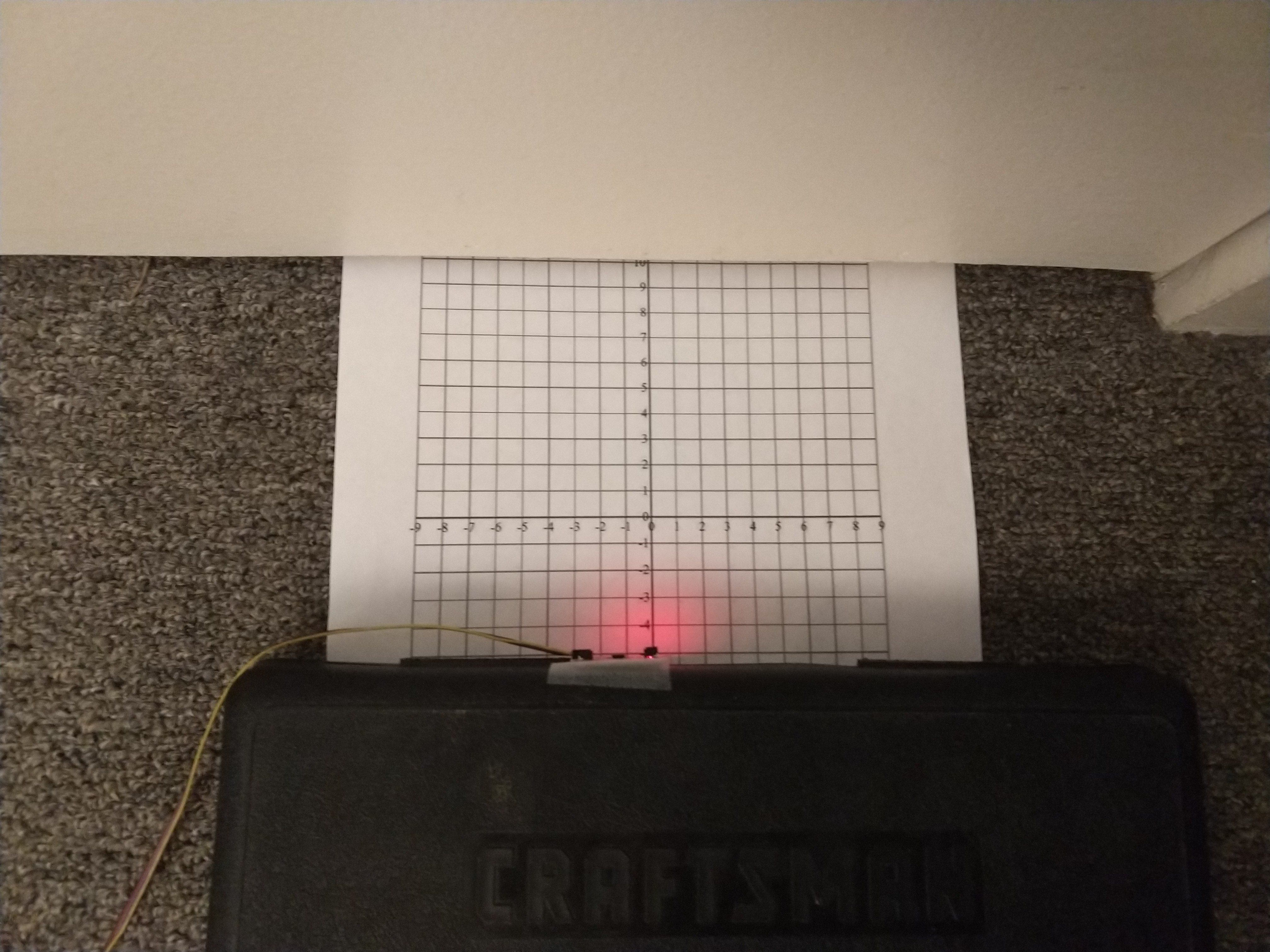 Figure 4. Ranging setup with door (using graph paper for 20cm or less). Note: used measuring tape and taller box for long-range testing.
Figure 4. Ranging setup with door (using graph paper for 20cm or less). Note: used measuring tape and taller box for long-range testing.
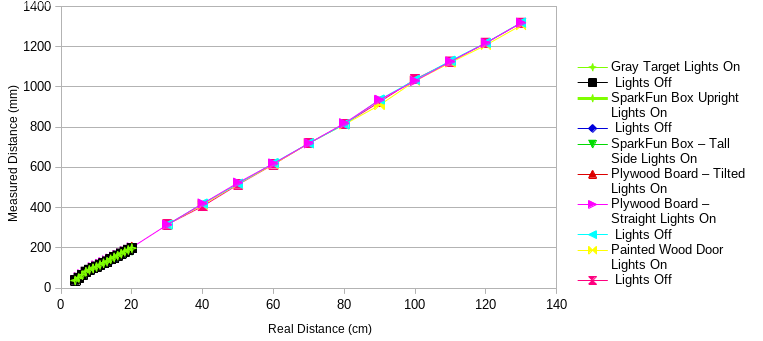 Figure 5. Measured range (short range mode) vs. real range.
Figure 5. Measured range (short range mode) vs. real range.
In the long-range case, my (mini) tape measure was only 1 m long, so I added an 18” ruler at the end of the tape measure to reach 1.4 m. The ToF sensor was surprisingly immune to small changes in angle (probably because the beam spans about 15°); but, when mounted low, it kept picking up the rough carpet, leading to noisy and very inaccurate measurements. To mount the sensor higher, I taped it to the box of the RC car. That is why there is a series which dips back down, and another series labeled “raised”.
The VL53L1X ToF sensor didn’t seem to see the metal desk leg at all. Hence, I did not gather range data for that. This will obviously cause bloopers when the robot cannot see shiny metal objects.
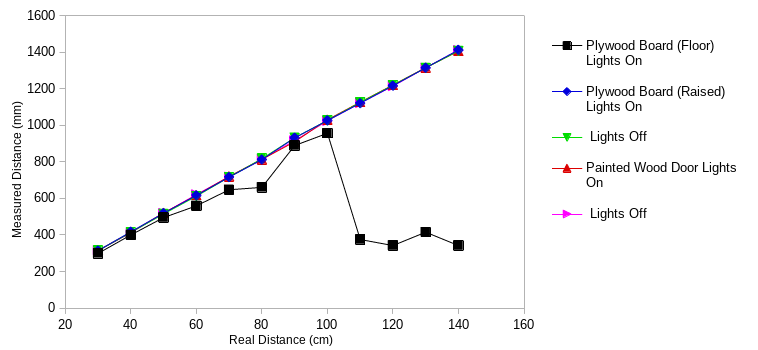 Figure 6. Measured range (long range mode) vs. real range.
Figure 6. Measured range (long range mode) vs. real range.
Unfortunately, the SparkFun library doesn’t have a function to output the signal or the sigma values. It can only set the thresholds. By default, these are
Signal intensity threshold: 0.0
Standard deviation threshold: 0.0
This seems to mean that there is no threshold. (I tried showing more decimal places and they were also zeros.)
I also didn’t notice much change in accuracy when I increased or decreased the time between measurements (at least not during manual testing.) By default, it is
100 ms between measurements.
When I moved the ToF sensor back and forth suddenly, it still gave consistent readings as fast as I could move it. Without knowing what typical standard deviations and signal intensities were, I didn’t have data to improve the values. So, I left these values at their defaults.
Update on Robot Construction
The wires now fit through the hole; I used the Qwiic-to-serial connectors and fed the pins through one at a time.
Both sensors are taped securely on the front using the double-sided tape.
The IMU and the Artemis board are also taped to the top. Unfortunately, the tape isn’t that sticky and the top is slippery, so they keep coming off. I intend to use duct tape again after the next lab.
The LiPo battery is taped to the bottom of the robot. This eliminates mess on the top and makes it easier to unplug or replace the battery without removing the Artemis. It also allows the Artemis USB-C port to face off the edge of the robot, so I can easily plug and unplug it to upload code.
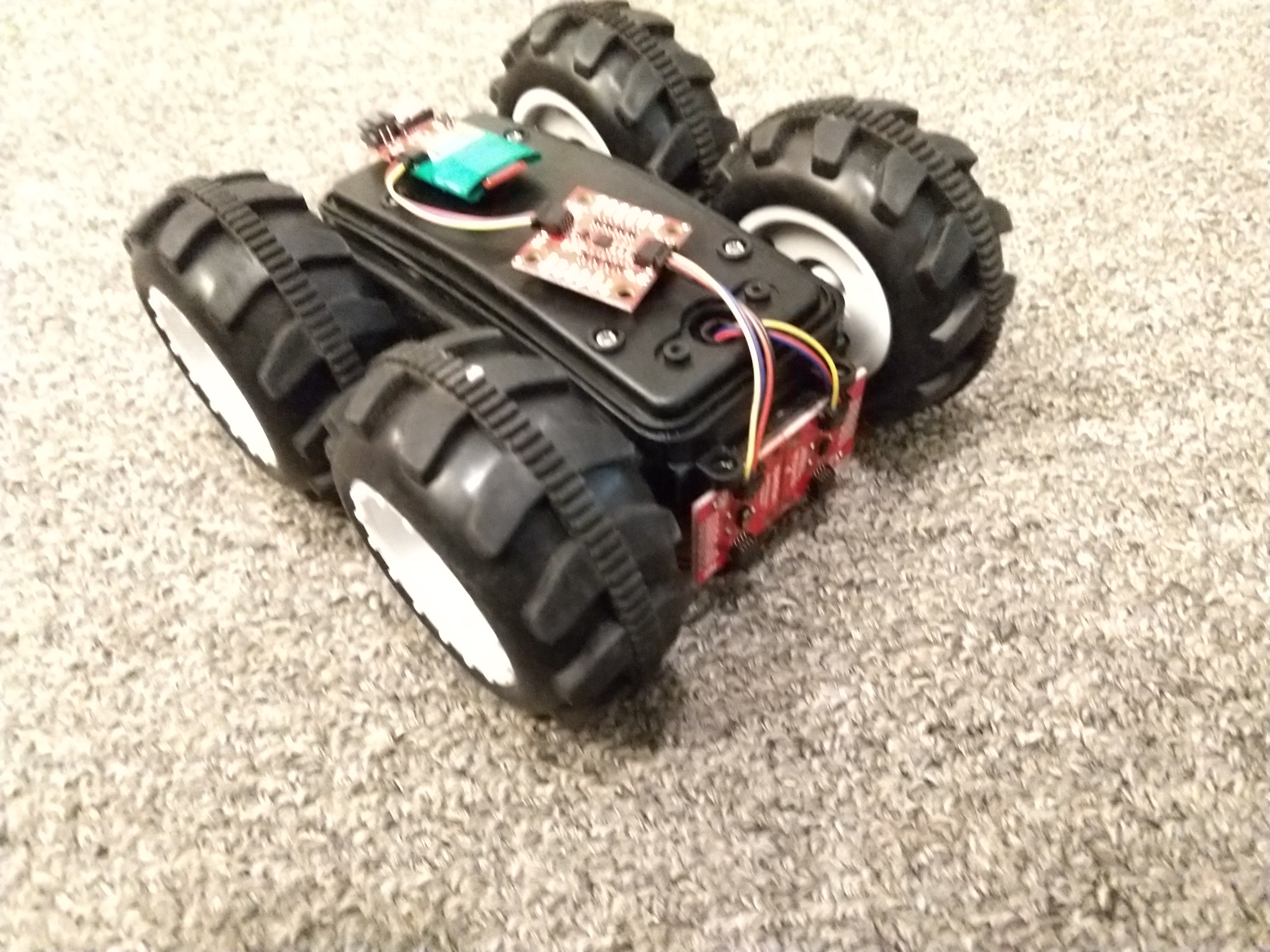 Figure 7. Front of robot, showing rangefinders (front), IMU (top, front), and RedBoard Artemis (top, back).
Figure 7. Front of robot, showing rangefinders (front), IMU (top, front), and RedBoard Artemis (top, back).
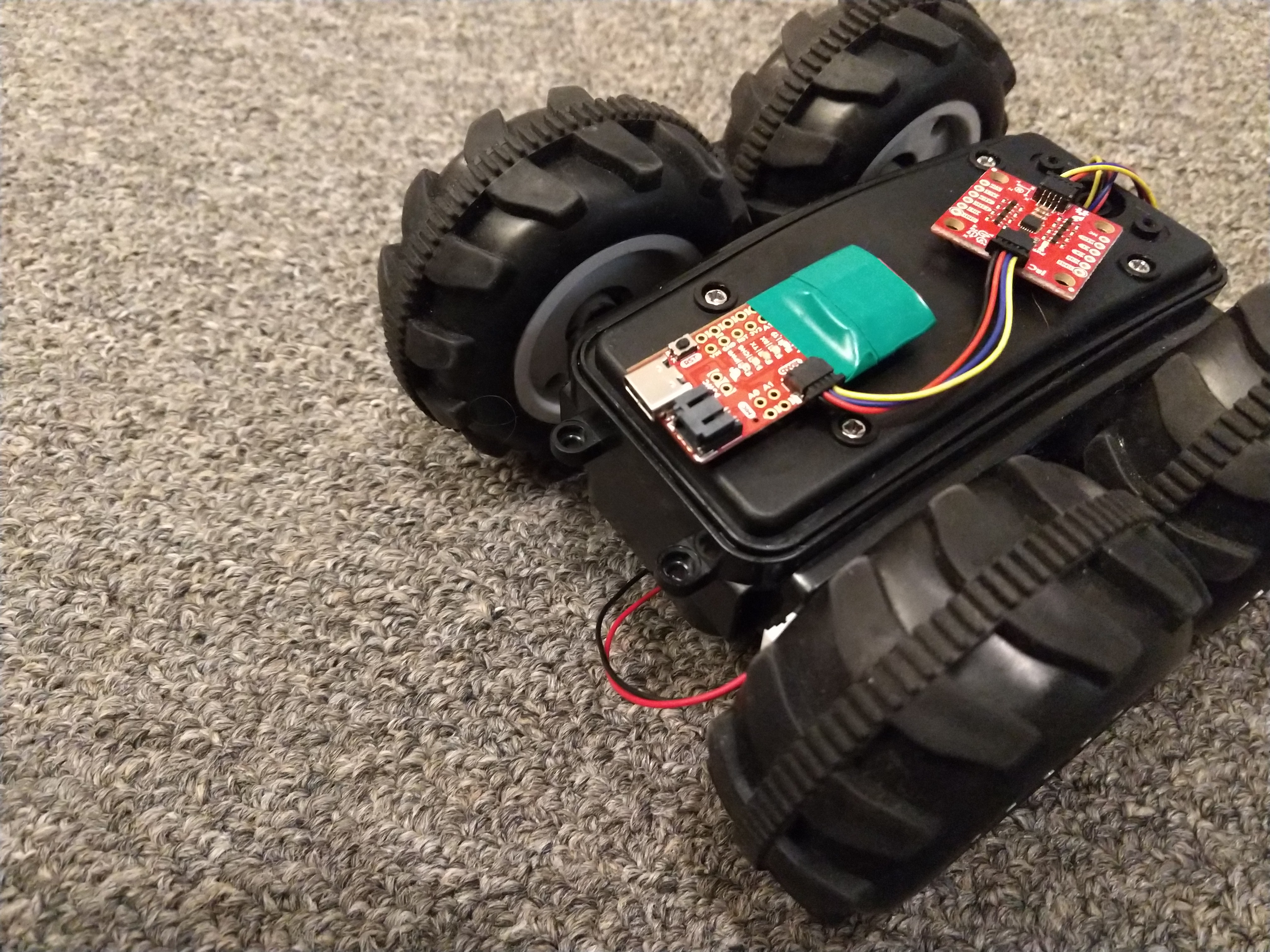 Figure 8. Rear of robot, showing RedBoard Artemis (top, front), IMU (top, back), and LiPo battery (underneath, unplugged.)
Figure 8. Rear of robot, showing RedBoard Artemis (top, front), IMU (top, back), and LiPo battery (underneath, unplugged.)
Obstacle Avoidance
Unfortunately, I spent a long time taking data and didn’t get obstacle avoidance working in time. Below, I made the mistake of using a binary on-off speed control with too long of a minimum range.
I was able to drive faster and still be able to stop when I set the robot to control its speed by how far away it was from an obstacle.
Backing up while turning gave even better results. Note the deceleration as it approaches an obstacle.
The robot can drive pretty fast without hitting the wall. Below is a video of it driving down a 0.4m tape strip. Note the deceleration.
This one is faster, after I get the robot to aim the right direction:
See all my range measurements, pictures, videos, and code here on GitHub.
Physical Robot - Data
Ex post facto, I realized that I typed square brackets instead of parentheses when inserting my graphs. See above for the data which was there, but not there. Adding to Lessons Learned.
Simulation
This was a simple exercise after previous labs. I found that it was much easier to dodge walls when the robot traveled in arcs, so I set it to always drive in long arcs since it’s impossible to be perfectly parallel to a wall.
def perform_obstacle_avoidance(robot):
while True:
# Obstacle avoidance code goes here
if robot.get_laser_data()<0.5:
robot.set_vel(0.0,0.5) # turn
initialAngle = robot.get_pose()[2]
angleTurned = 0
while angleTurned < 0.5: # turn about 30 degrees, then read again
angleTurned = robot.get_pose()[2]-initialAngle
robot.set_vel(0,0)
else:
robot.set_vel(0.5,0.05) # drive in a slight curve since we will
# never be exactly parallel to a wall
time.sleep(0.1)
perform_obstacle_avoidance(robot)
The turning function uses a while loop to ensure it turns (at least) 30 degrees. Since this simulated robot starts and stops basically instantly, it will turn exactly 30 degrees.
The reasoning for this is to allow the robot to “follow” walls to which it is neither perpendicular nor parallel. (Good practice for my room with lots of angles.) However, in this perfect simulated environment, all the surfaces are perpendicular to each other. A simplified version and its performance are shown below.
See all my code here on GitHub. Also see additional things I learned and notes in the Other Lessons Learned page.
Lab 6
Materials Used
- Robot from lab 5, containing
- Driving base of RC car
- 4.8V NiCd battery
- SparkFun Serially Controlled Motor Driver (SCMD)
- SparkFun VCNL4040 IR proximity sensor breakout board
- SparkFun VL53L1X IR rangefinder breakout board
- SparkFun ICM-20948 9 DoF IMU breakout board
- SparkFun RedBoard Artemis
- 3.7v LiPo battery
- 4 short SparkFun Qwiic (I²C) connector cables (or long cables and zip ties)
- Electrical tape, duct tape, and sticky pads (3M)
- Computer with the following software:
- Course Ubuntu 18.04 VM (installed in Lab 1)
- Arduino IDE with Artemis RedBoard Nano board installed
- At least the following Arduino libraries:
- Core libraries (Arduino, etc.)
- Serial Controlled Motor Driver (Sparkfun)
- SparkFun 9DoF IMU Breakout - ICM 20948 - Arduino Library
- SparkFun VCNL4040 Proximity Sensor Library
- SparkFun VCNL53L1X 4m Laser Distance Sensor
- Optional: SerialPlot - also on sourcehut
- USB A-C cable (for a computer with USB A ports)
Procedure
Physical Robot (part a)
Reviewed the Sparkfun product info and documentation for the ICM-20948 IMU. Noted (among other things) that the default I²C address is 0x69.
With the SparkFun 9DoF IMU Breakout - ICM 20948 - Arduino Library installed, and the IMU connected to the Artemis via a Qwiic cable, ran the Example1_Wire Arduino sketch (Arduino IDE: File > Examples > Wire (under “Examples for Artemis RedBoard Nano”). Confirmed the default I²C address.
Ran the Example1_Basics Arduino sketch (accessed from the IDE by File > Examples > SparkFun 9DoF IMU Breakout - ICM 20948 - Arduino Library). Confirmed that the IMU read out sensible values on all nine axes.
Wrote code to calculate the tilt angle using the accelerometer. Wrote code to calculate roll, pitch, and yaw using the gyroscope. Wrote code to calculate the yaw angle using the magnetometer. Wrote sensor fusion code using the accelerometer and the gyroscope.
Added features to the Bluetooth communication code allowing it to send IMU data and to receive motor commands over Bluetooth. Modified command set to add a “ramp” command (optional) and wrote Python code to spin in place, ramping the motor values from zero to maximum and back again. Collected IMU rotation rate data from the spin experiment. Wrote Python code to spin the robot at a constant speed; adjusted this speed to find a minimum and measured it using IMU data. Wrote Python code to implement a PI control of the rotation rate.
Simulation (part b)
Downloaded and extracted the lab six base code. In the VM, entered the folder and ran ./setup.sh. Closed and reopened the terminal window. Started lab6-manager and robot-keyboard-teleop. Entered /home/artemis/catkin_ws/src/lab6/scripts and started jupyter lab. Ensured the notebook kernel used Python 3.
Followed the notebook instructions.
Results and Notes
Yes, the Wire code found an I²C device at 0x69. It also still recognized the other three I²C devices at the same default addresses. I won’t bore you with the output.
There was a magnet in my computer (to hold the lid shut.) The magnetometer readings near that magnet changed drastically as I moved the IMU from one side of the magnet to the other. All other readings were sensible (with constant offsets.) Below are demos of accelerometer and gyroscope readings.
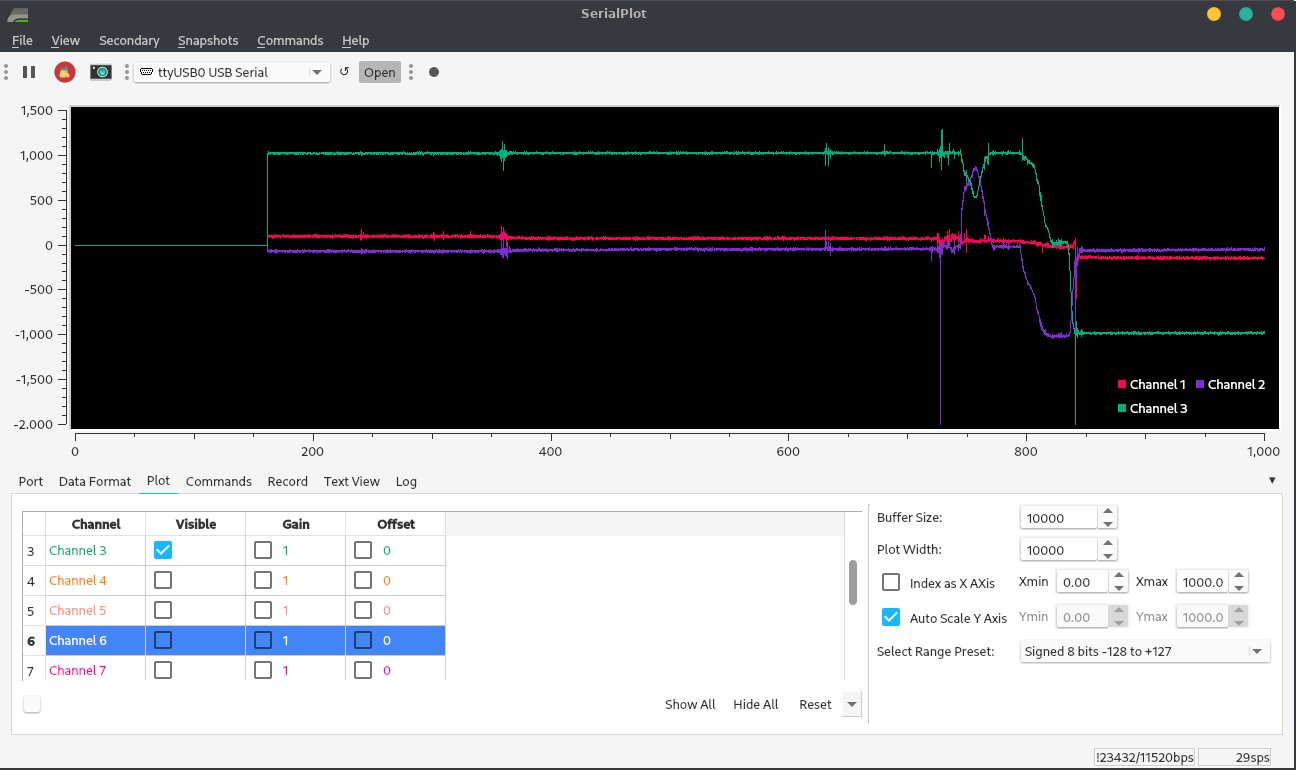 Figure 1. Accelerometer data when the robot is tilted, then flipped upside-down. The data is in milli-g’s; z is facing down when the robot is level. The axis facing the ground reads 1 g when it’s head-on; when it isn’t, the gravitational acceleration is distributed among the axes.
Figure 1. Accelerometer data when the robot is tilted, then flipped upside-down. The data is in milli-g’s; z is facing down when the robot is level. The axis facing the ground reads 1 g when it’s head-on; when it isn’t, the gravitational acceleration is distributed among the axes.
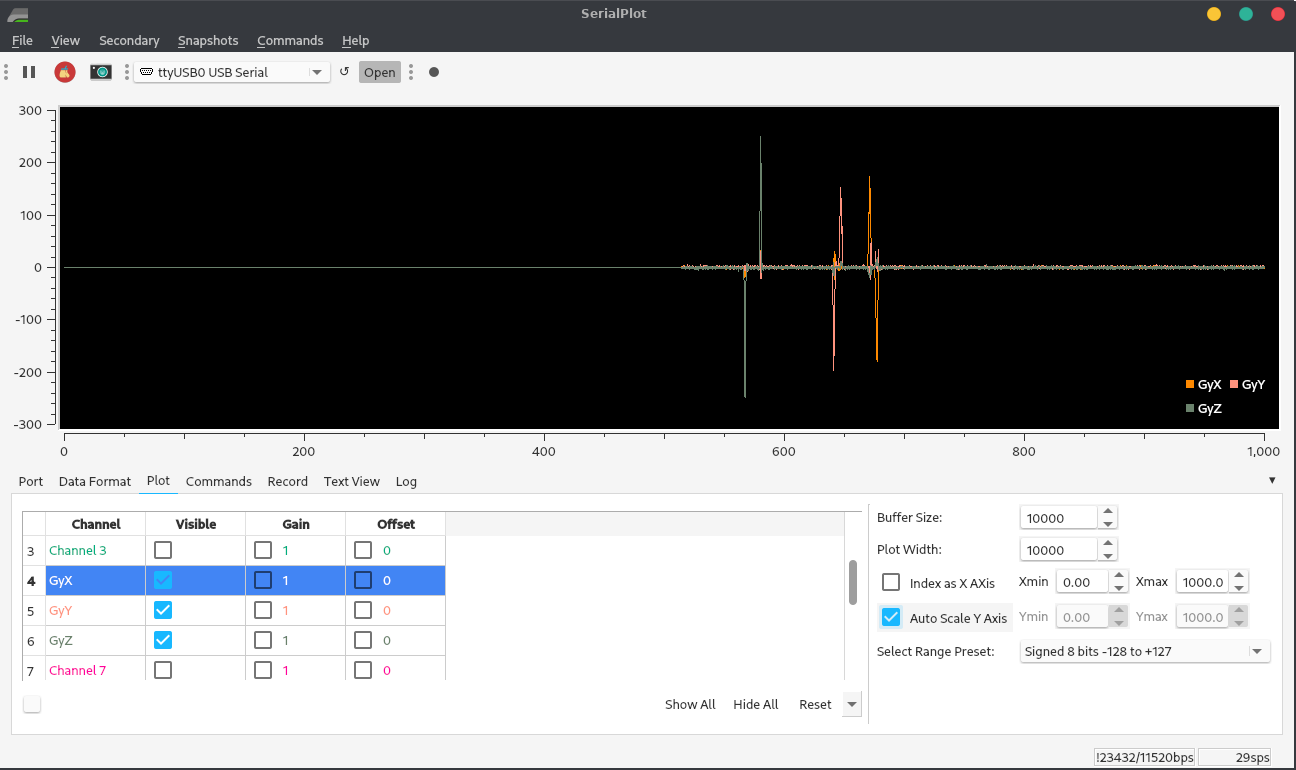 Figure 2. Accelerometer data when the robot is rotated about 90° about its three axes. The data is angular rate: the derivative of the robot’s three orientation angles. Matching the product datasheet, rotating it CCW about Z, and then back, gave a positive spike and then a negative spike with equal area. Rotating it CW about Y, and then back, gave it a negative spike and then a positive spike with equal area. Rotating it CCW about X, and then back, gave it a positive spike, and then a negative spike with equal area.
Figure 2. Accelerometer data when the robot is rotated about 90° about its three axes. The data is angular rate: the derivative of the robot’s three orientation angles. Matching the product datasheet, rotating it CCW about Z, and then back, gave a positive spike and then a negative spike with equal area. Rotating it CW about Y, and then back, gave it a negative spike and then a positive spike with equal area. Rotating it CCW about X, and then back, gave it a positive spike, and then a negative spike with equal area.
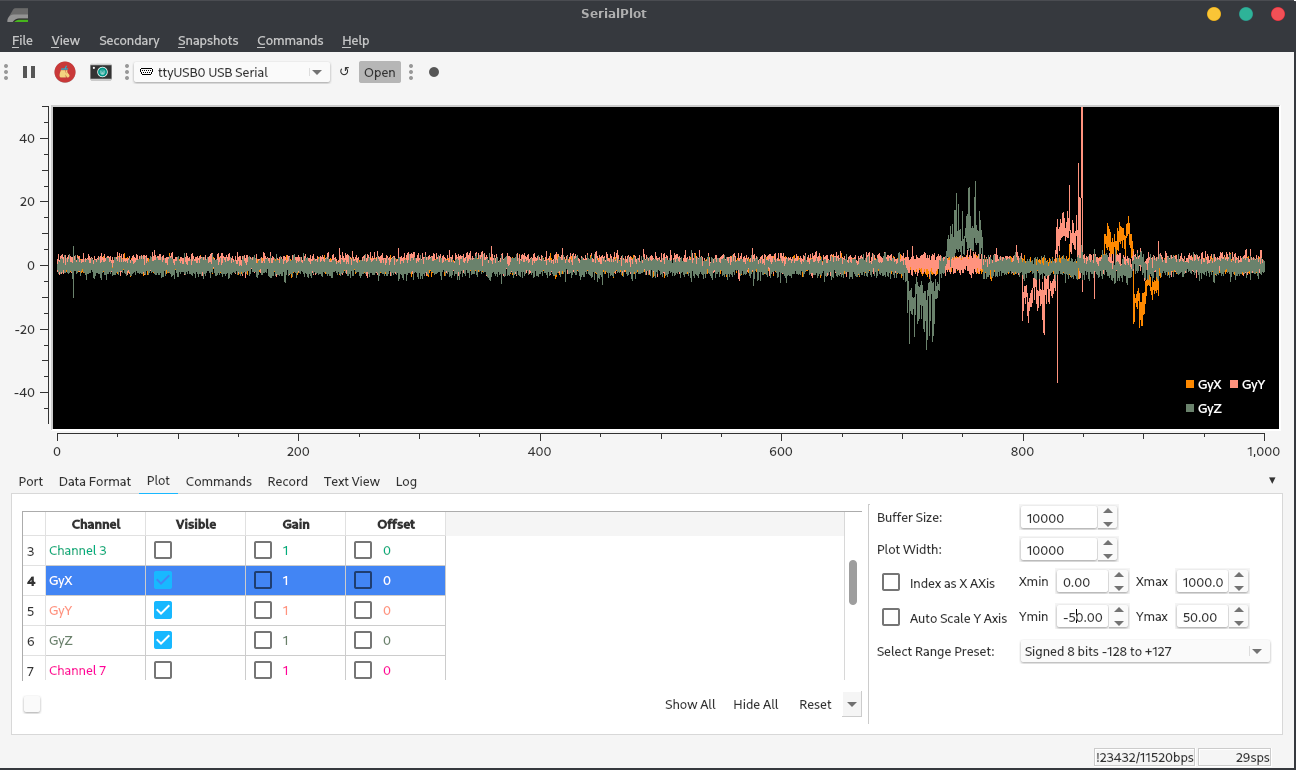 Figure 3. Bonus: if I rotate slowly, the peaks are the same area, but flattened out! The bigger peaks are from when my hand slipped and I bumped the Qwiic cable. Also note the noise in the background when the robot is stationary!
Figure 3. Bonus: if I rotate slowly, the peaks are the same area, but flattened out! The bigger peaks are from when my hand slipped and I bumped the Qwiic cable. Also note the noise in the background when the robot is stationary!
Finding Tilt from Accelerometer Data
At first, I tried finding angle using atan2. This was horribly noisy at 90° because the z acceleration, in the denominator, approached zero when the robot was tilted 90°: one axis would be accurate and the other would have nearly ±90° of noise. I solved this problem by dividing by the total acceleration and using asin instead:
aX = myICM.accX(); aY = myICM.accY(); aZ = myICM.accZ();
a = sqrt(pow(aX,2)+pow(aY,2)+pow(aZ,2));
roll = asin(aX/a)*180/M_PI;
pitch = asin(aY/a)*180/M_PI;
Serial.printf("%4.2f,%4.2f\n",roll,pitch);
Below is the output as I moved from -90° to 0° to 90° in roll and pitch, respectively.
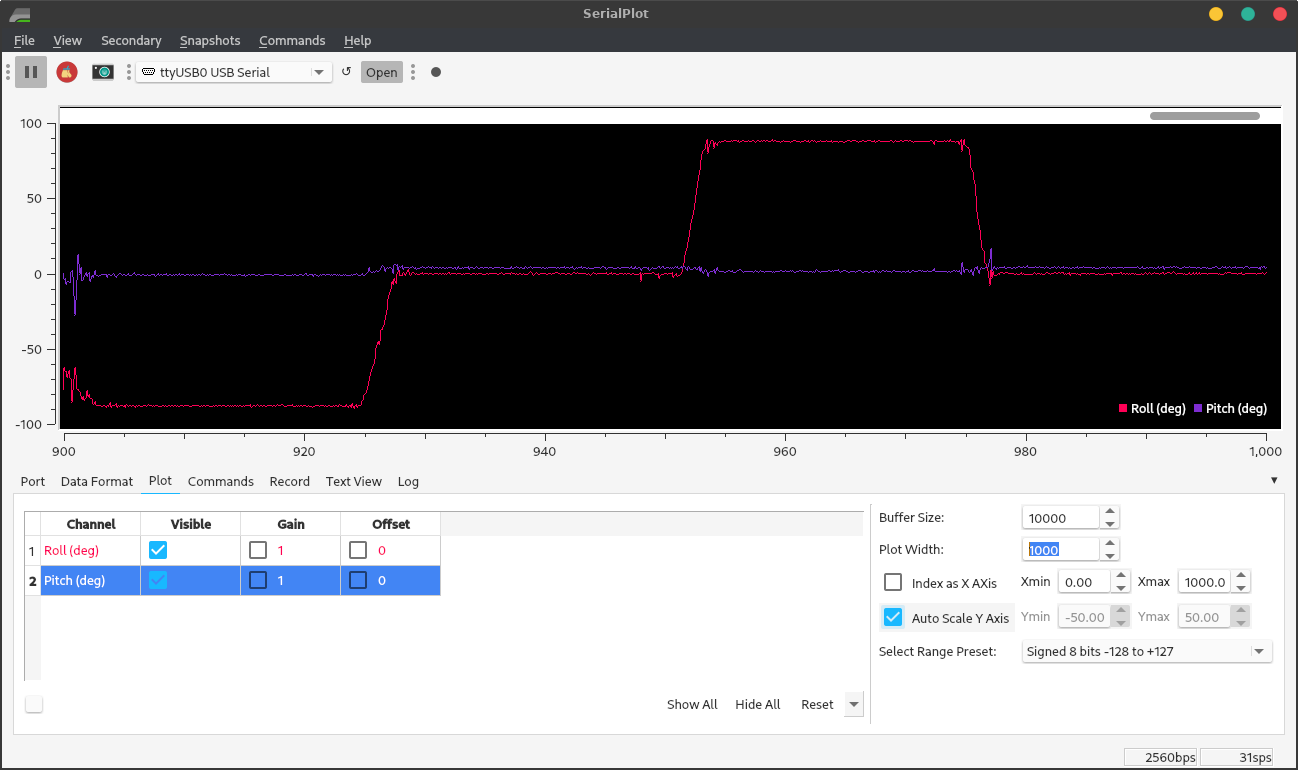 Figure 4. Accelerometer angle readings from roll at right angles.
Figure 4. Accelerometer angle readings from roll at right angles.
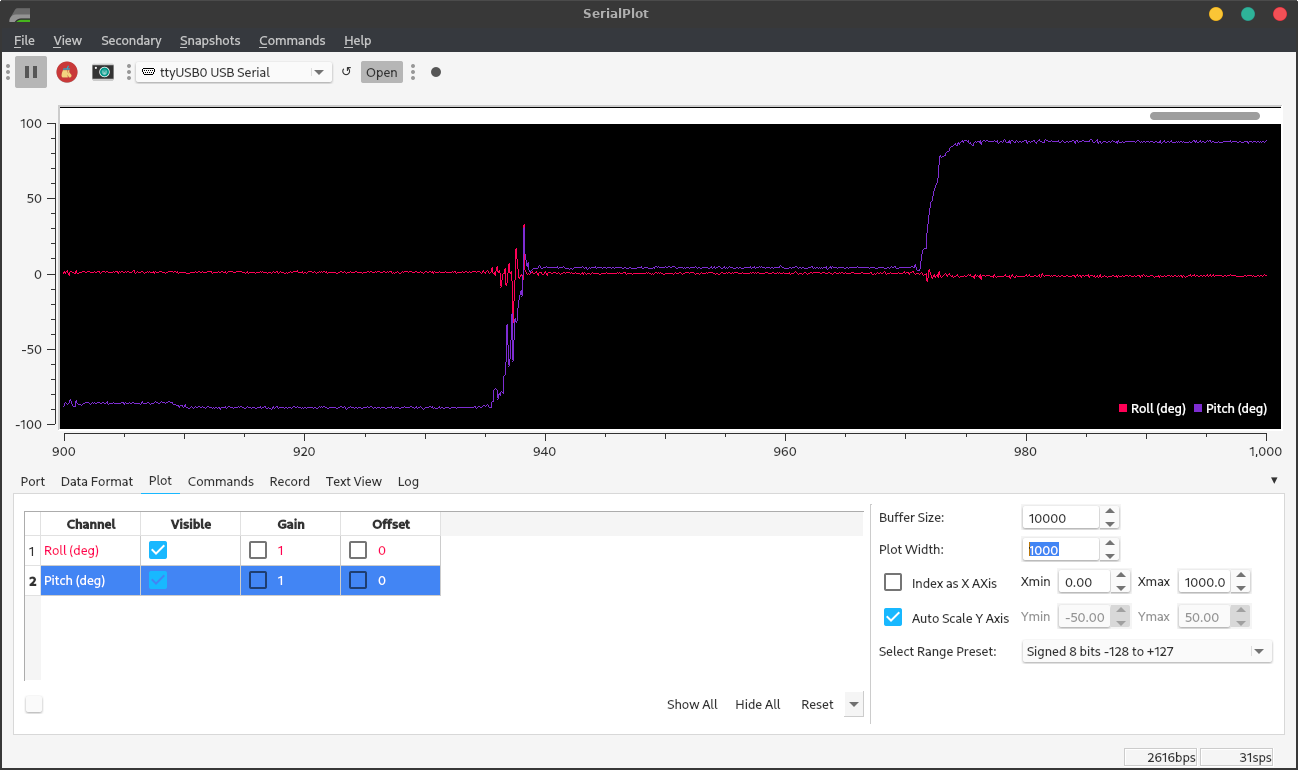 Figure 5. Accelerometer angle readings from pitch at right angles.
Figure 5. Accelerometer angle readings from pitch at right angles.
The accelerometer is quite accurate (though noisy.) Using SerialPlot, I found that it detected the 5° curve of the top of the robot. It consistently reads about 88° tilt when I tilt it 90° – probably for the same reason it reads more than 1 g when it’s level: calibration.
Finding Angles from Gyroscope Data
The gyroscope angles were much less noisy, since the angle is acquired by integrating the rate, the angle looks like it’s been through a low-pass filter. Precise calibration is difficult, since the gyroscope’s angular rate measurements change both in short and in long time spans. So, some drift in the readings is inevitable, but this calibration code worked well.
//// Calibrate gyroscope angles
//Serial.println("Calibrating gyro...");
int tCal = calTime*1000000; // 1 sec = 1000000 microseconds
float thXCal = 0, thYCal = 0, thZCal = 0; // angles to measure during calibration while the gyro is stationary
tNow = micros();
int tStartCal = tNow; // starting calibration now!
while(tNow-tStartCal < tCal){ // run for tCal microseconds (plus one loop)
tLast = tNow; // what was new has grown old
delay(tWait);
myICM.getAGMT(); // The values are only updated when you call 'getAGMT'
tNow = micros(); // update current time
dt = (float) (tNow-tLast)*0.000001; // calculate change in time in seconds
omX = myICM.gyrX(); omY = myICM.gyrY(); omZ = myICM.gyrZ(); // omega's (angular velocities) about all 3 axes
thXCal = thXCal + omX*dt; // update rotation angles about X (roll)
thYCal = thYCal + omY*dt; // Y (pitch)
thZCal = thZCal + omZ*dt; // and Z (yaw)
}
// and we want the average rotation rate in deg/s after that loop
omXCal = thXCal / calTime;
omYCal = thYCal / calTime;
omZCal = thZCal / calTime;
//Serial.printf("Calibration offsets: X %6.4f, Y %6.4f, Z %6.4f degrees per second\n",omXCal,omYCal,omZCal);
Below are the results of the same type of test as I ran on the accelerometer: rotating each axis to -90°, 0°, and +90°.
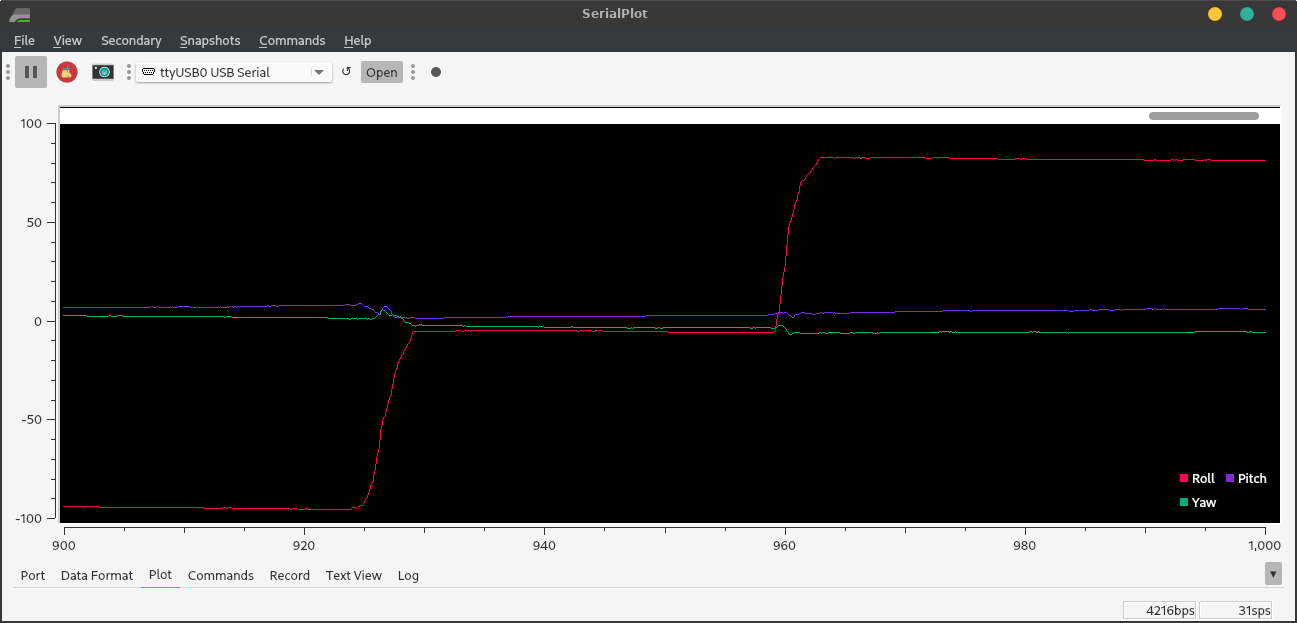 Figure 6. Gyro angle readings from roll at right angles.
Figure 6. Gyro angle readings from roll at right angles.
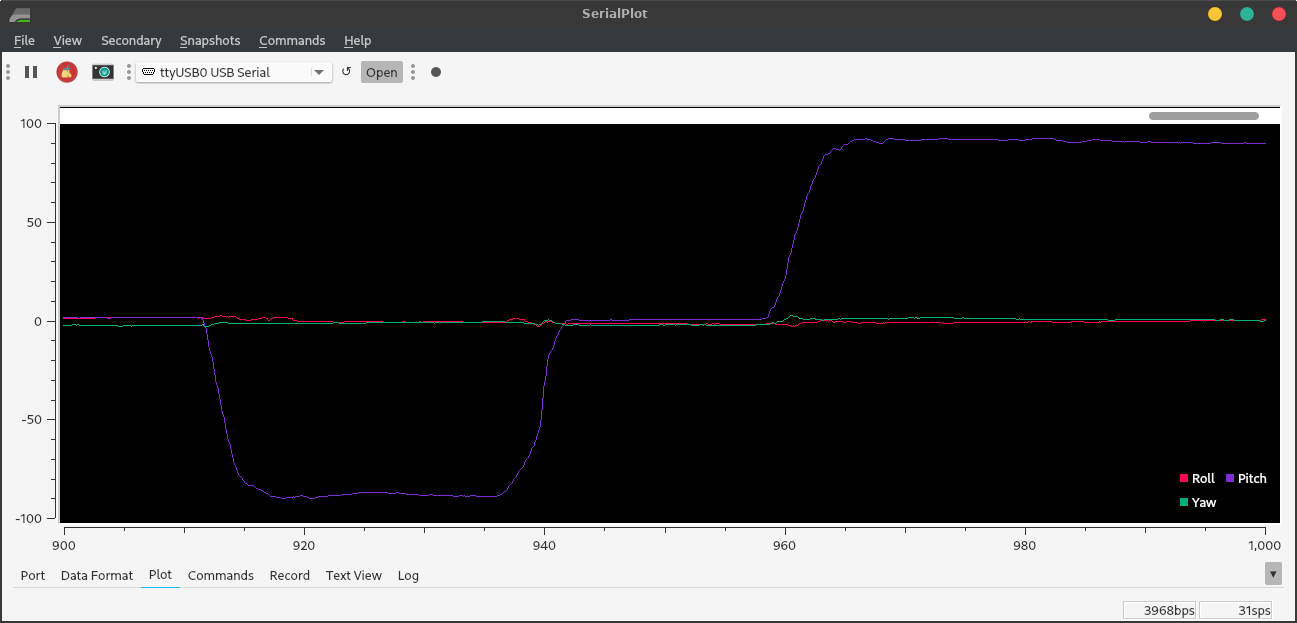 Figure 7. Gyro angle readings from pitch at right angles.
Figure 7. Gyro angle readings from pitch at right angles.
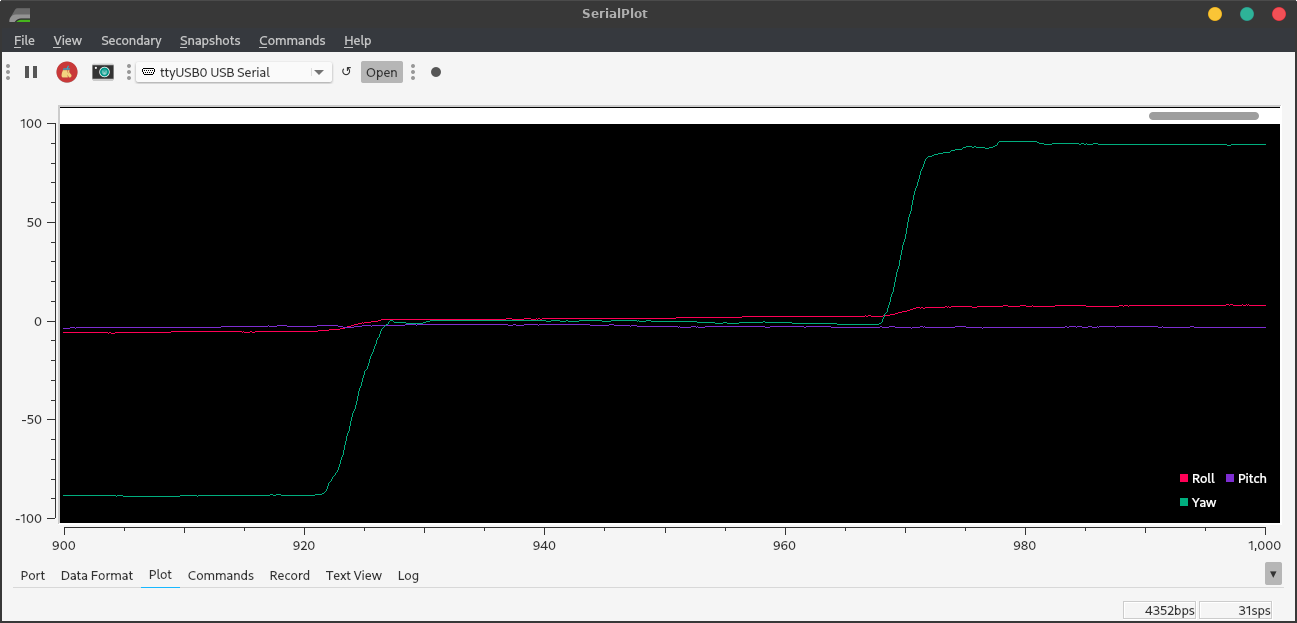 Figure 8. Gyro angle readings from yaw at right angles.
Figure 8. Gyro angle readings from yaw at right angles.
Note how stable the readings are, compared to those of the accelerometer. The wiggles in the graph are real - I was repositioning the robot or not holding it perfectly still. However, the gyro readings can be ruined by bad calibration.
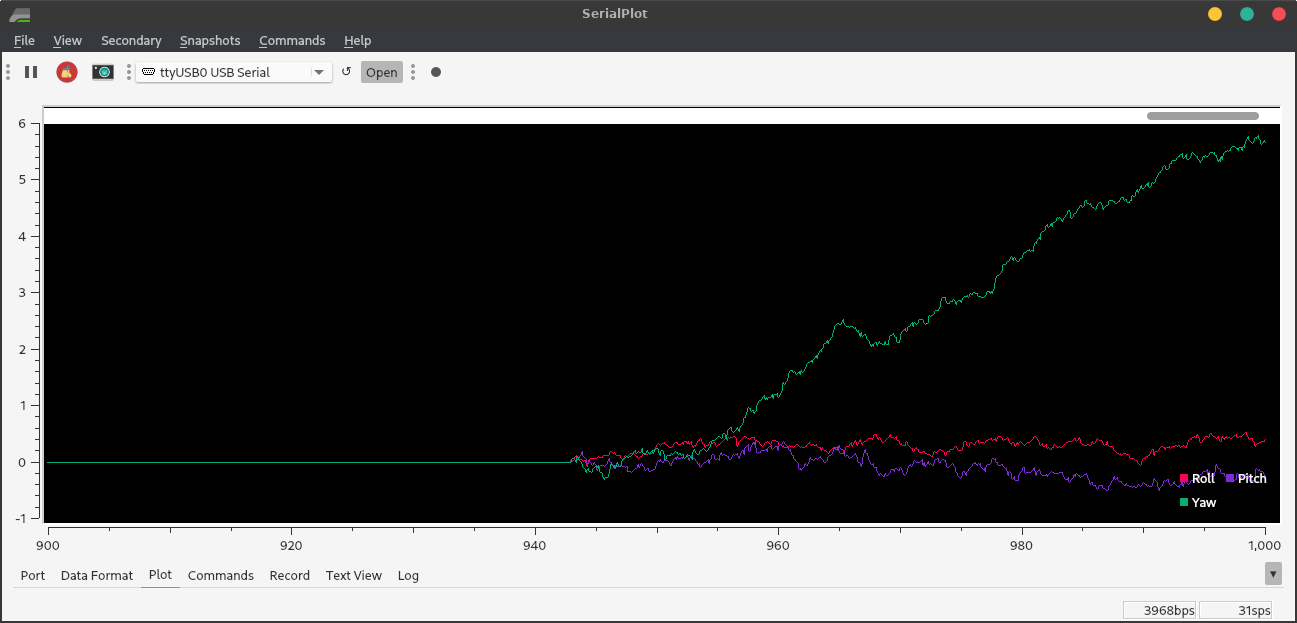 Figure 9. Calibration doesn’t always work.
Figure 9. Calibration doesn’t always work.
With sampling rates of 1 kHz or less, I noticed that the integration was always more accurate with a faster sampling rate, regardless of calibration time.
I tried removing delays, giving a sampling rate of about 10 kHz. The result was no more accurate, and there were massive spikes or sometimes step changes. I hypothesize that this happened when a noise spike coincided with a short loop cycle.
I left the wait time at 10ms (100Hz sampling rate) for the rest of the lab.
I got the best results thus far from a complementary filter with α=0.3 and a correction factor of 1 for the accelerometer. α=0.5 works fine, but is noisy. The main bumps in this graph are from my imperfect movements. Drift is about 1° per minute for yaw and zero for the other axes.
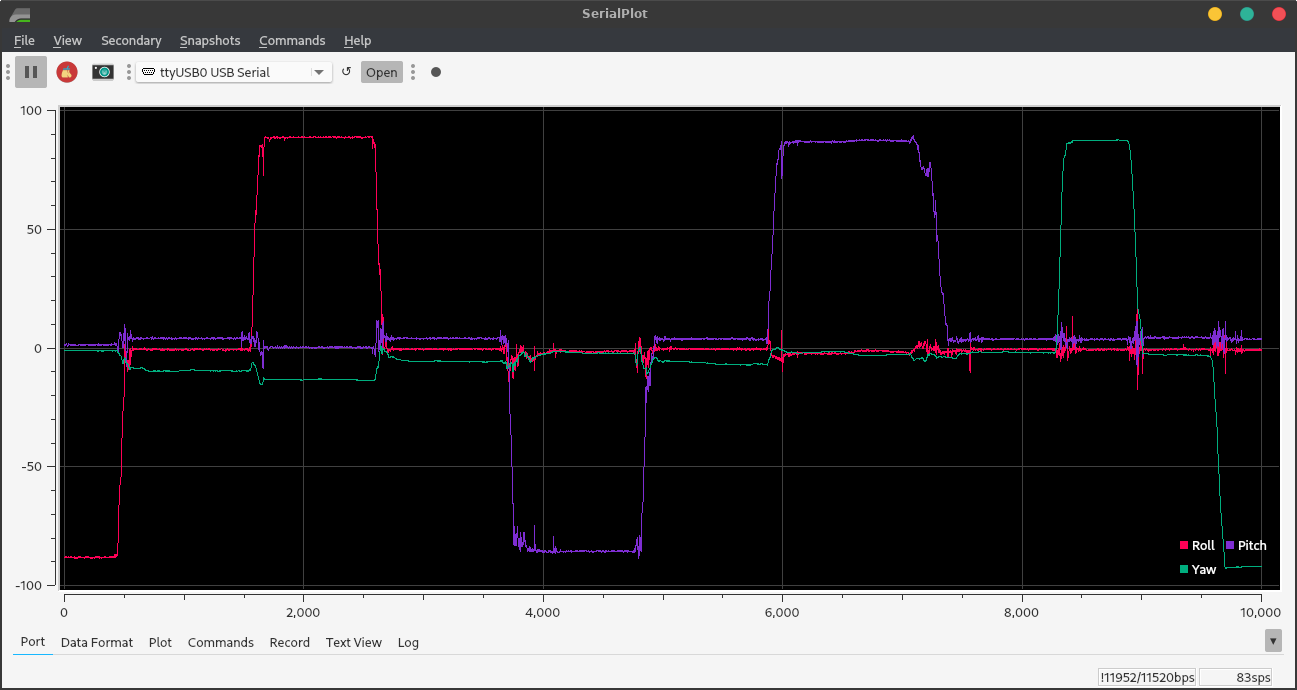 Figure 10. Roll, pitch, and yaw tests; roll and pitch have a complementary filter with α=0.3 in favor of the gyroscope.
Figure 10. Roll, pitch, and yaw tests; roll and pitch have a complementary filter with α=0.3 in favor of the gyroscope.
if( myICM.dataReady() ){
myICM.getAGMT(); // The values are only updated when you call 'getAGMT'
tLast = tNow; // the new has grown old
tNow = micros();
dt = (float) (tNow-tLast)*0.000001; // calculate change in time in seconds
// printRawAGMT( myICM.agmt ); // Uncomment this to see the raw values, taken directly from the agmt structure
// printScaledAGMT( myICM.agmt); // This function takes into account the scale settings from when the measurement was made to calculate the values with units
aX = myICM.accX(); aY = myICM.accY(); aZ = myICM.accZ();
omX = myICM.gyrX()-omXCal; // omega's (angular velocities) about all 3 axes
omY = myICM.gyrY()-omYCal;
omZ = myICM.gyrZ()-omZCal;
thX = thX + omX*dt; // update rotation angles about X (roll)
thY = thY + omY*dt; // Y (pitch)
thZ = thZ + omZ*dt; // and Z (yaw)
a = sqrt(pow(aX,2)+pow(aY,2)+pow(aZ,2)); // calculate total acceleration
rollXL = asin(aY/a)*compFactorRoll*rad2deg;
pitchXL = asin(aX/a)*compFactorPitch*rad2deg;
roll = alpha*rollXL + (1-alpha)*thX; // complementary filter
pitch = alpha*pitchXL + (1-alpha)*thY;
thX = roll; thY = pitch; // overwrite any gyro drift
yaw = thZ; // still waiting for the magnetometer
Serial.printf("%4.2f,%4.2f,%4.2f\n",roll,pitch,yaw); // and print them
delay(tWait);
}
Finding Angles from the Magnetometer
Besides obvious things like DC motors, there are magnets to hold our laptops shut, magnets in screwdrivers, and lots of steel beams in buildings. Moving the IMU into the center of my room, away from known magnets, I still saw a constant magnetic field of 50 μT into the floor. Worse, the field near the DC motors is about 1000 μT compared to 25-65 μT from Earth.
 Figure 11. Magnetometer readings on top of the chassis, sitting still and pointing nearly north.
Figure 11. Magnetometer readings on top of the chassis, sitting still and pointing nearly north.
A miniscule ~60 Hz oscillation is superimposed on the constant field. But, when I roll the robot back and forth with my hand:
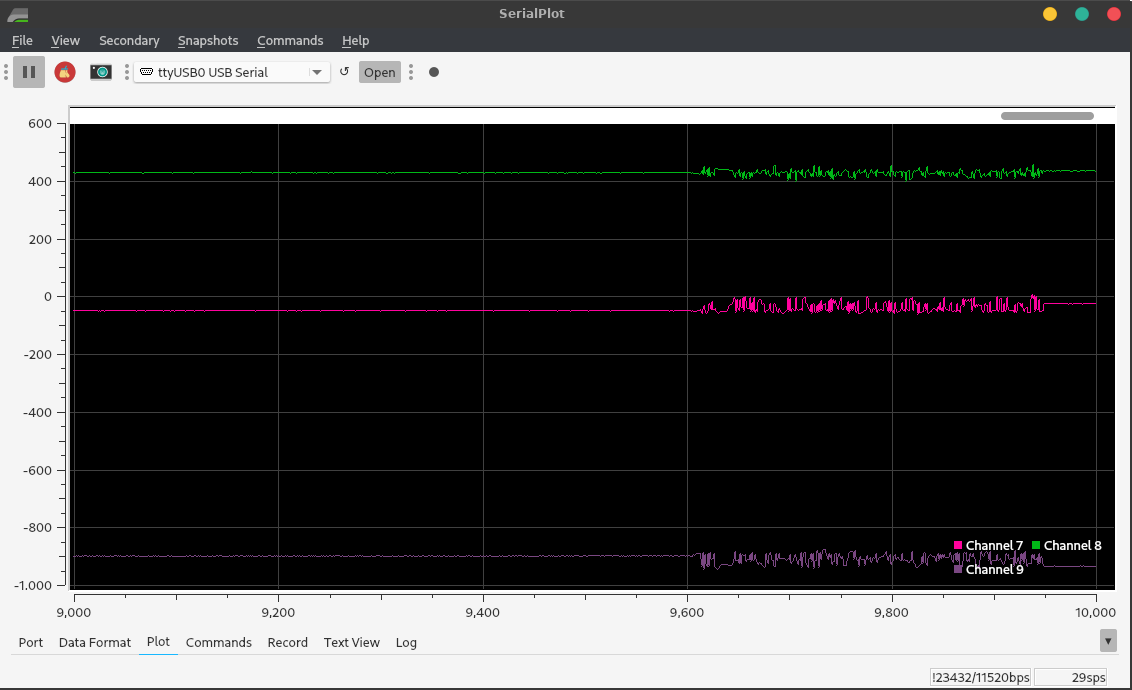 Figure 12. Magnetometer readings when backdriving the motors.
Figure 12. Magnetometer readings when backdriving the motors.
I was able to calibrate away all the constant fields and achieve sensible angle readings when the wheels didn’t turn. However, the change in magnetic field when the wheels turn is of similar magnitude to that of the Earth (about 20 μT amplitude) so I couldn’t get reliable magnetometer readings.
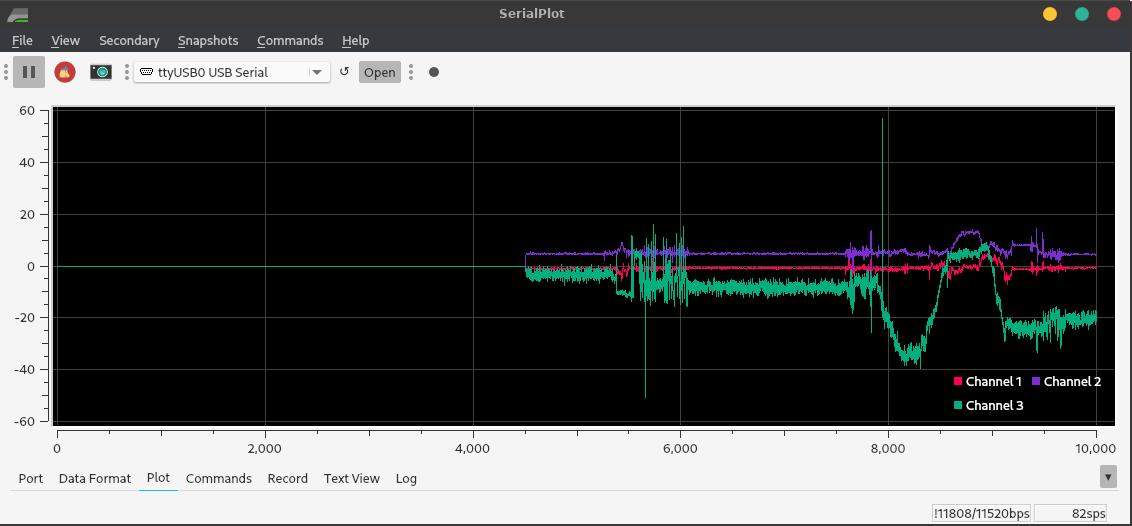 Figure 13. Magnetometer angle readings: decently accurate until the motors turn.
Figure 13. Magnetometer angle readings: decently accurate until the motors turn.
//// Calibrate gyroscope and magnetometer readings
// For magnetometer calibration to work, it must begin pointing north.
//Serial.println("Point me north!")
//delay(1000);
Serial.println("Calibrating...");
int tCal = calTime*1000000; // 1 sec = 1000000 microseconds
float thXCal = 0, thYCal = 0, thZCal = 0; // angles to measure during calibration while the gyro is stationary
tNow = micros();
int tStartCal = tNow; // starting calibration now!
while(tNow-tStartCal < tCal){ // run for tCal microseconds (plus one loop)
if( myICM.dataReady() ){
tLast = tNow; // what was new has grown old
delay(tWait);
myICM.getAGMT(); // The values are only updated when you call 'getAGMT'
tNow = micros(); // update current time
dt = (float) (tNow-tLast)*0.000001; // calculate change in time in seconds
omX = myICM.gyrX(); omY = myICM.gyrY(); omZ = myICM.gyrZ(); // omega's (angular velocities) about all 3 axes
thXCal = thXCal + omX*dt; // update rotation angles about X (roll)
thYCal = thYCal + omY*dt; // Y (pitch)
thZCal = thZCal + omZ*dt; // and Z (yaw)
mXCal = mXCal + myICM.magX();
mYCal = mYCal + myICM.magY();
mZCal = mZCal + myICM.magZ();
count++; // total number of magnetometer readings taken (for gyro we care about rate; for mag we care about total)
}
}
// and we want the average rotation rate in deg/s after that loop
omXCal = thXCal / calTime;
omYCal = thYCal / calTime;
omZCal = thZCal / calTime;
mXCal = mXCal / count;
mXCal = mXCal - 40; // Compensate for the earth's magnetic field
mYCal = mYCal / count;
mZCal = mZCal / count;
//Serial.printf("Calibration offsets: X %6.4f, Y %6.4f, Z %6.4f degrees per second\n",omXCal,omYCal,omZCal);
// Loop: Read angles
if( myICM.dataReady() ){
myICM.getAGMT(); // The values are only updated when you call 'getAGMT'
tLast = tNow; // the new has grown old
tNow = micros();
dt = (float) (tNow-tLast)*0.000001; // calculate change in time in seconds
// printRawAGMT( myICM.agmt ); // Uncomment this to see the raw values, taken directly from the agmt structure
// printScaledAGMT( myICM.agmt); // This function takes into account the scale settings from when the measurement was made to calculate the values with units
aX = myICM.accX(); aY = myICM.accY(); aZ = myICM.accZ();
omX = myICM.gyrX()-omXCal; // omega's (angular velocities) about all 3 axes
omY = myICM.gyrY()-omYCal;
omZ = myICM.gyrZ()-omZCal;
mX = myICM.magX()-mXCal; // m's (normalized magnetometer readings) along all 3 axes
mY = myICM.magY()-mYCal;
mZ = myICM.magZ()-mZCal;
thX = thX + omX*dt; // update rotation angles about X (roll)
thY = thY + omY*dt; // Y (pitch)
thZ = thZ + omZ*dt; // and Z (yaw)
a = sqrt(pow(aX,2)+pow(aY,2)+pow(aZ,2)); // calculate total acceleration
rollXL = asin(aY/a)*compFactorRoll*rad2deg;
pitchXL = asin(aX/a)*compFactorPitch*rad2deg;
roll = alpha*rollXL + (1-alpha)*thX; // complementary filter
pitch = alpha*pitchXL + (1-alpha)*thY;
thX = roll; thY = pitch; // overwrite any gyro drift
//yaw = thZ; // not doing complementary filter yet
rollRad = roll*deg2rad; pitchRad = pitch*deg2rad;
xm = mX*cos(pitchRad) + mZ*sin(pitchRad);
ym = mY*cos(rollRad) + mZ*sin(rollRad);
mTotal = sqrt(pow(xm,2)+pow(ym,2)); // total in-plane magnetic field
yaw = atan2(ym, xm)*rad2deg; // noisy near asymptotes
//yaw = acos(xm/mTotal)*rad2deg; // will this work? (no)
Serial.printf("%4.2f,%4.2f,%4.2f\n",roll,pitch,yaw); // and print them
delay(tWait);
PID Control
Below is my data from a smooth ramp that incremented/decremented the motor power every 50 ms. Since the right and left drive power values were the same, the robot made a bad point turn; the left wheel tended to start spinning before the right. The below graph shows one of several tries. I chose a maximum of 500°/s based on testing on asphalt; clearly, the maximum speed is different on a kitchen floor.
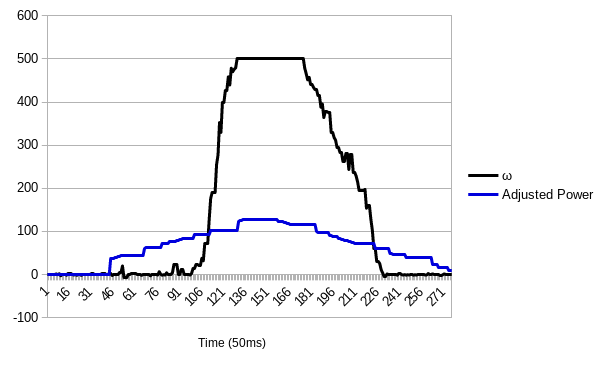 Figure 14. Open-loop ramp response. Note the deadband in the beginning. The gyro maxed out at 500°/s. The two wheels started spinning at nearly the same time. The bumps in the motor power graph are due to lost Bluetooth communication at a distance of 8ft. “Adjusted” power is scaled to ±127.
Figure 14. Open-loop ramp response. Note the deadband in the beginning. The gyro maxed out at 500°/s. The two wheels started spinning at nearly the same time. The bumps in the motor power graph are due to lost Bluetooth communication at a distance of 8ft. “Adjusted” power is scaled to ±127.
On a smooth tile floor, I found that the minimum rotational speed I could maintain was about 250°/s! This minimum speed would indicate that the points detected by the ToF sensor will be far apart. I found that the optimal sampling time for the ToF is 50-60 ms; per the datasheet, the minimum sampling time is 20 ms. Thus, I calculated the average distance between sensed points as 11 cm! A little noise will significantly affect the generated map.
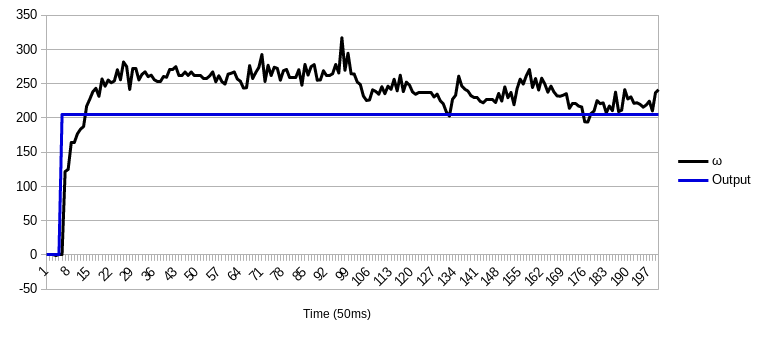 Figure 15. Open-loop step response of the robot with minimum motor power required to keep it spinning on a tile floor. Note the bumps: the robot drove over gaps between tiles.
Figure 15. Open-loop step response of the robot with minimum motor power required to keep it spinning on a tile floor. Note the bumps: the robot drove over gaps between tiles.
To accurately spin the robot in place, I chose to use PI control (no derivative) because the robot is a first-order system and its transfer function is already stable without adding derivative. Below are some graphs that demonstrate my tuning process: raise Kₚ until the system rings, reduce Kₚ, raise Kᵢ until it overshoots too much, drop Kᵢ, and raise Kᵢ again. I used only the gyroscope to measure yaw rates. The below PID loop, run online using Bluetooth, could not react fast enough to the light robot’s sudden changes in speed. The graph is the best I could do at an intermediate speed of 300°/s.
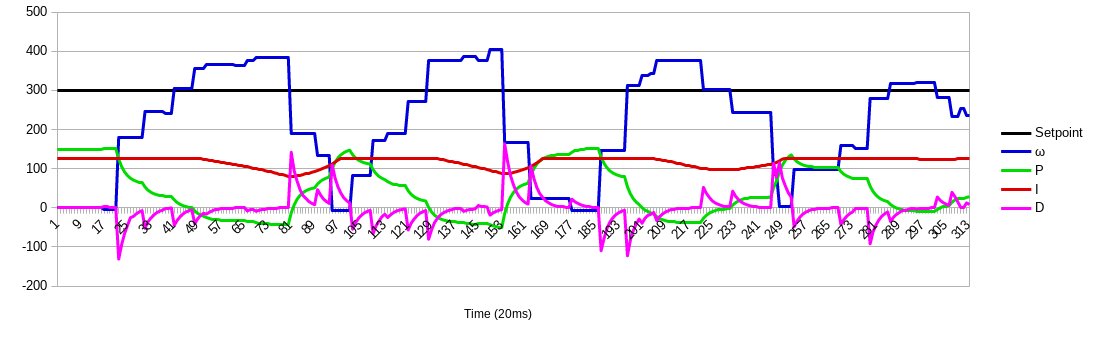 Figure 16. Step response of the robot using a PI controller running on the computer in Python.
Figure 16. Step response of the robot using a PI controller running on the computer in Python.
# PID loop (currently PI)
global z, e, tNow, setpoint, inte, kp, ki, kd, xyzd, levels
while True:
await asyncio.sleep(0.05)
zLast = z
eLast = e
tLast = tNow
z = xyzd[2] # current sensor value
e = setpoint - z # error
tNow = time.clock_gettime(time.CLOCK_MONOTONIC)
dt = tNow - tLast
de = e - eLast # derivative of error
inte = inte + (e*dt) # integral term
if (inte > 127):
inte = 127 # positive windup control
elif (inte < -127):
inte = -127; # negative windup control
output = kp*e + ki*inte + kd*(de/dt)
# write motor power
output = output + 128 # centered at 127/128 rather than 0
if output < 0: # numbers in a bytearray are limited to [0,256]
output = 0
elif output > 255:
output = 255
output = int(output) # must be an integer
#outputL = int(output/2) # reduced power for left: drive in an arc
theRobot.updateMotor("left", output) # left is reversed
theRobot.updateMotor("right", output) # right is forward
# use "levels[1]" for current motor power reading from robot;
# use "output" for current scaled output from this code
motorPower = int((levels[1]-127.5)/1.27) # scale output to +/-100%
# Every loop, display desired speed, actual speed, and motor power
print("{},{},{}".format(setpoint,z,motorPower))
The PID controller worked much better when I loaded the PID control algorithm onto the robot instead, since there was no time delay due to latency. Below is a successful tuning graph:
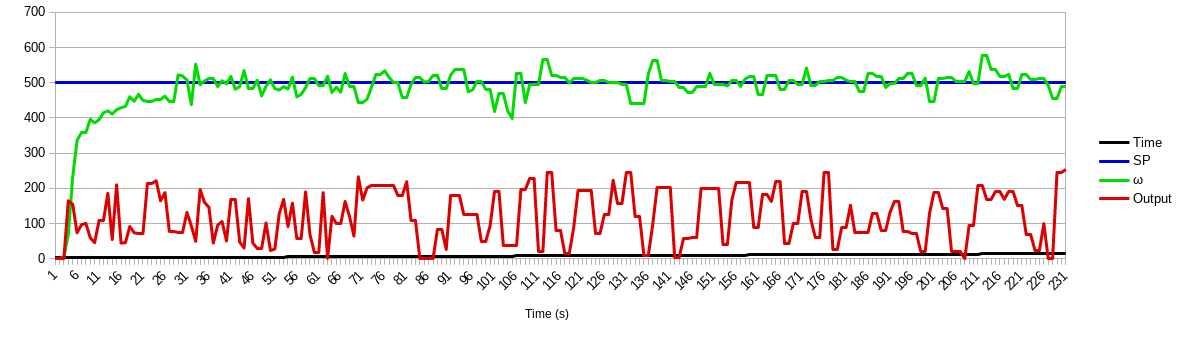
Figure 17. Step response of a PI controller running on the robot. Note I had to increase the range of the gyro to sense more than 500°/s.
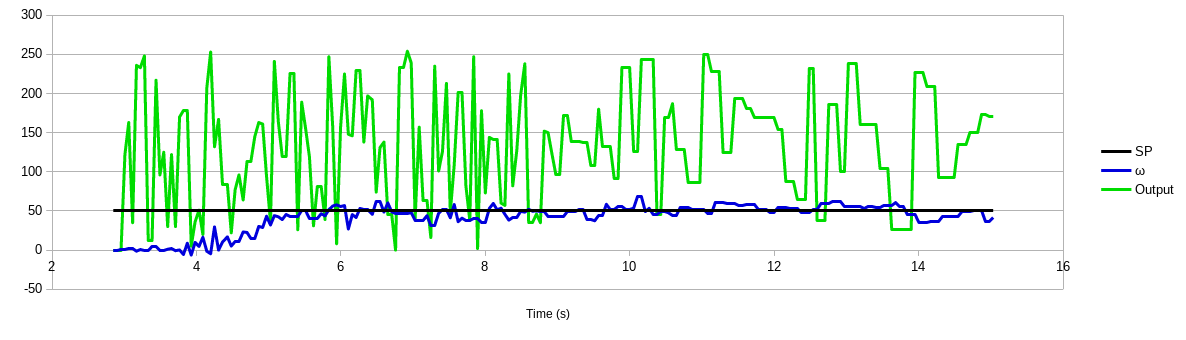
Figure 18. Moving much slower than was possible with open-loop control. Note that only one wheel was turning (even though I sent equal power to both.)
The minimum rotational speed I could maintain was now 50°/s using a PI loop with parameters kp = 0.75 and ki = 1.5 with a complementary lag filter using alpha = 0.5. This should allow much closer points, even with a 60ms timing budget, as shown below.
250°/s × (π rad / 180°) = 4.36 rad/s =
= 250°/s × (π rad / 180°) × 50 ms = 0.218 rad = 12.5°
= 250°/s × (π rad / 180°) × 50 ms × 0.5 m = 10.9 cm/s
= 50°/s × (π rad / 180°) × 50 ms × 0.5 m = 2.2 cm/s
= 50°/s × (π rad / 180°) × 60 ms × 0.5 m = 2.6 cm/s
Below is the PID controller written in Arduino:
if(pid){ // As long as we're running the controller,
eLast = e; // Update error (but don't update time - this is already done in the gyro section)
//tLast = t;
//t = micros();
//dt = (t - tLast)*0.000001;
e = alphaE*(setpoint-omZ)+(1-alphaE)*eLast; // lag filter on error
inte = inte + e*dt; // integral term
de = e - eLast; // numerator of deriv. term
if (inte > 255) // anti-windup control for integral
inte = 255;
else if (inte < -255)
inte = -255;
output = kp*e+ki*inte+kd*(de/dt); // calculate output
#ifdef SERIAL_PID
Serial.printf("P = %3.1f, I = %3.1f, D = %3.1f\n",kp*e, ki*inte, kd*(de/dt));
#endif
if (setpoint > 0){ // spinning clockwise (with IMU on bottom - CCW with IMU on top)
if (output > 255) // limit output to 1-byte range
output = 255;
else if (output < 0)
output = 0;
scmd.setDrive(left, lRev, output);
scmd.setDrive(right, rFwd, output);
}
else{ // spinning counterclockwise or stopping
if (output > 0) // limit output to 1-byte range
output = 0;
else if (output < -255)
output = -255;
scmd.setDrive(left, lFwd, -output); // and send the NEGATIVE of the output
scmd.setDrive(right, rRev, -output);
}
}
Simulation
Based on the speed of readings I got in SerialPlot earlier in this lab, I reasoned that >10 points/sec was excessive. I also tried plotting rates of <10 points/sec: the dots were sparse when the robot drove faster. So, I stuck with 10 points/sec.
The odometry readings looked similar to the ground truth, but they were offset and rotated. The amount of the offset and rotation increased with time (even when the robot was stationary), as I would expect with IMU drift. The noise in the points was surprisingly small compared to the movement of the robot. Not surprisingly, dragging the robot around by hand completely threw off the odometry.
Note that the drift was worse (though the rate of drift was about equal) with very low speeds of 0.05 linear and 0.08 turn.
 Figure 15. Ground-truth (green) and odometry (red) data from simulated robot.
Figure 15. Ground-truth (green) and odometry (red) data from simulated robot.
When I drove very fast (linear 6, angular 3), the pose estimate drifted less per distance traveled. But the rate of drift appears constant with time.
See all my results and code here on GitHub. The Data.ods spreadsheet contains many commented PID tuning graphs. Also see additional things I learned and notes in the Other Lessons Learned page. I spent a lot of this lab’s time trying to relay commands and data successfully over Bluetooth, so I added a “Bluetooth” section which explains the setup, what I learned about the asyncio library, and so on.
Lab 7
Note: Used the same materials from Lab 6 until Lab 12.
Lab 7a: Procedure
Downloaded the lab 7 base code; extracted; and ran lab7_base_code/setup.sh in the VM. Restarted terminal emulator; entered ~/catkin_ws/src/lab7/scripts/; and ran jupyter lab. In another terminal window, ran lab7-manager and started both the simulator and the plotter.
Followed the instructions in the Jupyter lab; wrote the pseudocode below to describe the Bayes filter algorithm.
Lab 7a: Results
# In world coordinates
def compute_control(cur_pose, prev_pose):
""" Given the current and previous odometry poses, this function extracts
the control information based on the odometry motion model.
Args:
cur_pose ([Pose]): Current Pose
prev_pose ([Pose]): Previous Pose
Returns:
[delta_rot_1]: Rotation 1 (degrees)
[delta_trans]: Translation (meters)
[delta_rot_2]: Rotation 2 (degrees)
Pseudocode (well, this code probably compiles):
delta_y = cur_pose[1] - prev_pose[1]
delta_x = cur_pose[0] - prev_pose[0]
delta_rot_1 = atan2(delta_y, delta_x)
delta_trans = sqrt(delta_y^2 + delta_y^2)
delta_rot_2 = cur_pose[2] - (prev_pose[2] + delta_rot_1)
"""
return delta_rot_1, delta_trans, delta_rot_2
# In world coordinates
def odom_motion_model(cur_pose, prev_pose, u):
""" Odometry Motion Model
Args:
cur_pose ([Pose]): Current Pose
prev_pose ([Pose]): Previous Pose
u = (rot1, trans, rot2) (float, float, float): A tuple with control data
in the format (rot1, trans, rot2) with units (degrees, meters, degrees)
Returns:
prob [ndarray 20x20x18]: Probability p(x'|x, u)
Pseudocode:
prevX, prevY, prevTh = prev_pose
for x,y,theta in gridPoints: # use fromMap() to get these coords.
# Figure out what each movement would have been to get here
dx = x-prevX; dy = y-prevY; dth = theta-prevTh;
dtrans = sqrt(dx^2+dy^2)
drot1 = atan2(dy,dx)
drot2 = dth - rot1i
pR = gaussian(trans, dtrans, odom_trans_sigma)
pTh1 = gaussian(rot1, drot1, odom_rot_sigma)
pTh2 = gaussian(rot2, drot2, odom_rot_sigma)
pXYT = pR*pTh1*pTh2 # probability we got all three right
prob[indices for x, y, theta] = pXYT # use toMap
"""
return prob
def prediction_step(cur_odom, prev_odom, loc.bel):
""" Prediction step of the Bayes Filter.
Update the probabilities in loc.bel_bar based on loc.bel
from the previous time step and the odometry motion model.
Args:
cur_odom ([Pose]): Current Pose
prev_odom ([Pose]): Previous Pose
loc.bel [ndarray 20x20x18]: Previous location probability density
Returns:
loc.bel_bar [ndarray 20x20x18]: Updated location probability density
Pseudocode:
loc.bel_bar = odom_motion_model(cur_odom, prev_odom)*loc.bel
"""
return loc.bel_bar
def sensor_model(obs, cur_pose):
""" This is the equivalent of p(z|x).
Args:
obs [ndarray]: A 1D array consisting of the measurements made in rotation loop
cur_pose ([Pose]): Current Pose
Returns:
probArray [ndarray]: Returns a 1D array of size 18 (=loc.OBS_PER_CELL) with the likelihood of each individual measurements
Pseudocode:
(x,y,theta) = cur_pose
for i in range(18):
d = getViews(x,y,theta)
probArray[i] = gaussian(obs[i], d, sensor_sigma)
"""
return prob_array
# In configuration space
def update_step(loc.bel_bar, obs):
""" Update step of the Bayes Filter.
Update the probabilities in loc.bel based on loc.bel_bar and the sensor model.
Args:
loc.bel_bar: belief after prediction step
obs [ndarray]: A 1D array consisting of the measurements made in rotation loop
Returns:
loc.bel [ndarray 20x20x18]: belief after update step
Pseudocode:
loc.bel = sensorModel(obs)*loc.bel_bar
eta = 1/sum(loc.bel) # normalization constant
loc.bel = loc.bel*eta
"""
"""
# Pseudocode for navigation with Bayes filter
while True:
next_pose = compute_motion_planning(loc.bel)
u = compute_control(next_pose, prev_pose)
execute_control(u)
cur_pose = get_odometry() # odometry data is available once the robot has moved
loc.bel_bar = prediction_step(cur_pose, prev_pose, loc.bel)
obs = update sensor readings
loc.bel = update_step(loc.bel_bar, obs)
prev_pose = cur_pose
"""
This pseudocode
- Ignores degrees and radians (Python functions use rads, everything else uses degrees)
- Ignores library names
- Uses fake function names to represent things I don’t have worked out yet
- “May throw some exceptions/errors, which is expected”
I have no pictures or recordings for what I did since it’s writing pseudocode. See the function documentation in the Jupyter notebook here on GitHub.
Lab 7b: Procedure
Chose a room to map. Measured and drew a scale drawing of the room; chose three positions from which to generate the map.
Manually (and later, automatically) rotated the robot around and used matplotlib.pyplot.polar() to ensure reasonable results.
Derived the coordinate transformation matrix based on the assumption that the robot turns perfectly about its left wheels.
Took three scans and saved them as .csv files.
Wrote Python code to concatenate them all together and output a bigger .csv which contained all the data. Scatterplotted the data. Manually chose starting and ending points for obstacles and saved two lists as .csv files: StartPoints.csv and EndPoints.csv. Plotted the generated map in the Plotter tool.
Lab 7b: Results
I chose a kitchen since it had a tile floor rather than carpet. Conveniently, the tiles were exactly 6” by 6” so I was able to precisely (within 1cm) position the robot using the tiles. Note that this is the same surface I used to tune the PID controller and to do most of the other testing.
The kitchen was 6m x 3m in its largest dimensions so I added boxes to tell the robot when to stop. Below is a sketch of the kitchen layout. Stools with shiny metal legs were removed.
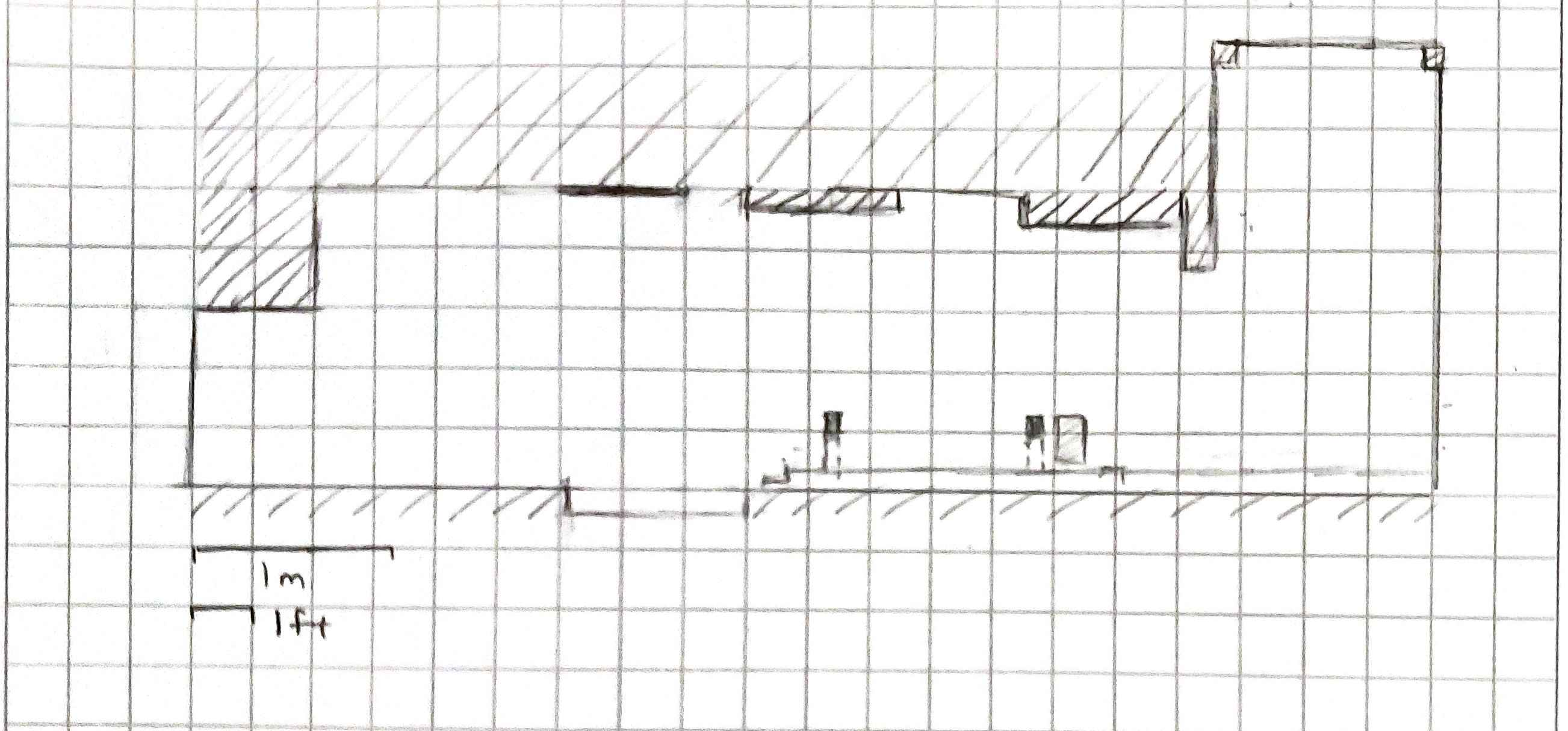 Figure 1. Layout of kitchen with no added obstacles.
Figure 1. Layout of kitchen with no added obstacles.
I added obstacles to one end so that the room appears to be 5m x 3m; this avoids the worry of running out of memory.
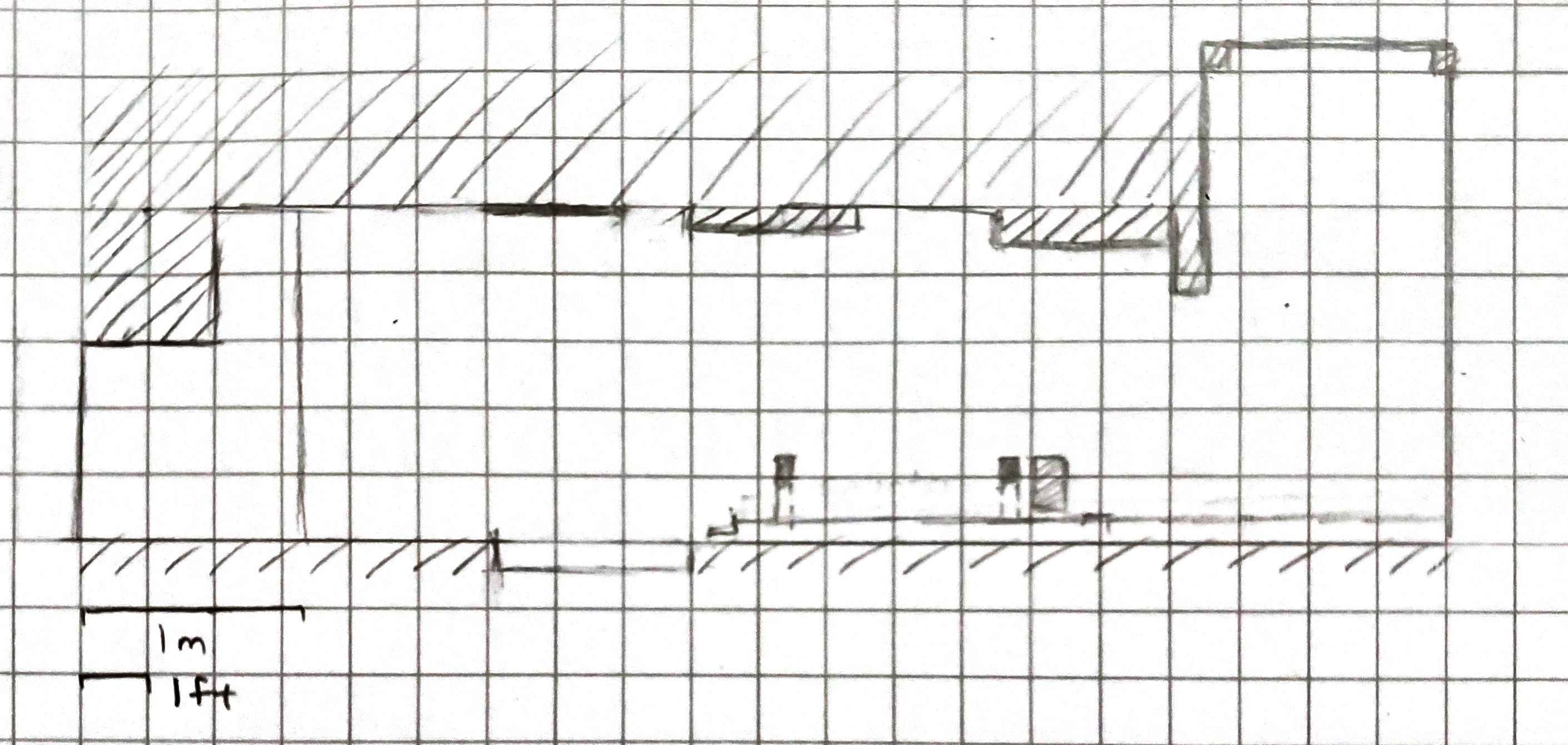 Figure 2. Layout of kitchen with added “wall” of boxes, boards, etc.
Figure 2. Layout of kitchen with added “wall” of boxes, boards, etc.
The plot (from the center of the area on the right) looked the way I expected. Note the curvature of corners due to the wide beam, and also the error due to a floor which isn’t totally flat. Significantly, the plot is rotated 90° to the left. I may need to turn my plots around due to drift in the sensor.
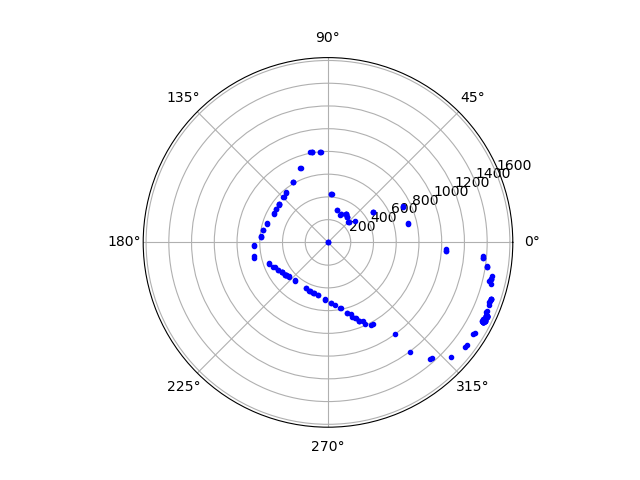 Figure 3. Map data acquired by manually turning the robot in place in the lower left-hand corner of the kitchen sketch shown.
Figure 3. Map data acquired by manually turning the robot in place in the lower left-hand corner of the kitchen sketch shown.
Note that the sensor was not calibrated properly, so the map is rotated by about 30°. Also note that the robot did not turn in place (it swing-turned about one side), so the readings will differ by the width of the robot. Also note that the kitchen is open at the jagged part, but the sensor appears to be seeing bumps in the floor instead. I flipped the robot upside-down so that the ToF was elevated farther off the ground. Of course, all the PID tuning was now backwards, so I flipped the directions of the output to compensate for this.
// setDrive(motor, direction, powerLevel)
scmd.setDrive(left, lFwd, output); // formerly lRev
scmd.setDrive(right, rRev, output); // formerly rFwd
I took three 360° scans, at locations 3.5 × 3.5 tiles; 3.5 × 14.5 tiles; and 3.5 × 24.5 tiles. Thus, the starting coordinates were . All scans started in the center of a tile, facing in the positive x direction. Below is the code I used to process the three scans and generate a single scatterplot. The robot did not spin about its center axis; I incorporated the resulting radial and y offsets into the code.
#!/usr/bin/python3
import numpy as np
import matplotlib.pyplot as pylot
sq2m = 6/39.37 # tile squares to meters conversion
deg2rad = np.pi/180 # degrees to radians conversion
for i in range(3):
filename = "Rotation" + str(i+1) + ".csv"
polar = np.genfromtxt(filename,delimiter=',')
lenCart = len(polar[:,1]) # length of array to be generated
thetas = polar[0:-1,0] # first column
rs = polar[0:-1,1] # second column
cart = np.empty([lenCart,3]) # starting array for Cartesian coordinates
if i==0:
xr = 3.5*sq2m # x offset, m
yr = 3*sq2m # y offset, m (-0.5 for turn radius)
elif i==1:
xr = 3.5*sq2m # x offset, m
yr = 14*sq2m # y offset, m (-0.5 for turn radius)
elif i==2:
xr = 3.5*sq2m # x offset, m
yr = 24*sq2m # y offset, m (-0.5 for turn radius)
xy = np.array([(xr,yr)]).reshape(2,1) # 2x1 column vector
for j in range(lenCart-1):
th = -thetas[j]*deg2rad # angles are in degrees; backwards
d = np.zeros([3,1]) # 3x1 vector for ToF dist. measurement
d[0] = rs[j]/1000 # distances are in mm (first element of d)
d[1] = 0.5 # y offset (distance from center point of arc)
d[2] = 1 # and the last entry should be 1
R = np.array([(np.cos(th), -np.sin(th)),(np.sin(th), np.cos(th))])
T = np.block([[R, xy],[0,0,1]])
Td= np.matmul(T,d) # and the matrix math pays off.
cart[j,:] = Td.reshape(3)
if i==0:
cart1 = cart
elif i==1:
cart2 = cart
elif i==2:
cart3 = cart
cartesianCoords = np.concatenate((cart1,cart2,cart3),axis=0) # looong x,y array
xs = cartesianCoords[:,0]
ys = cartesianCoords[:,1]
fig = pylot.figure()
ax = fig.add_axes([0,0,1,1])
pylot.plot(xs,ys,'g.')
ax.set_xlim(-1,5)
ax.set_ylim(-1,5)
pylot.show()
output = np.vstack([xs,ys]).T
np.savetxt("Points.csv",output,delimiter=",")
The result (after some improvement from the original) looked like a snowman.
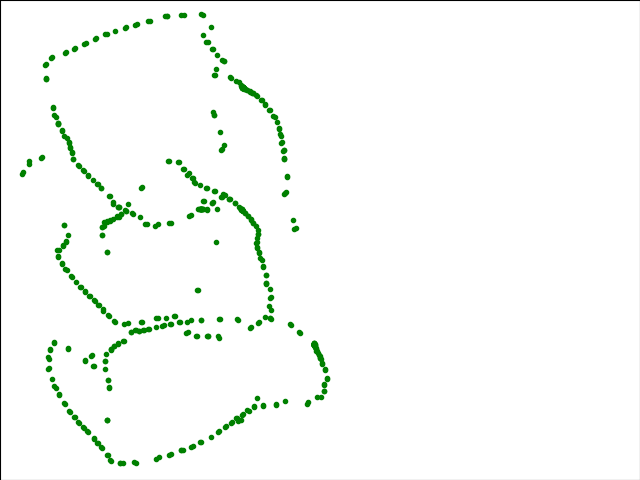 Figure 4. Drift really makes a difference in these slow scans.
Figure 4. Drift really makes a difference in these slow scans.
Frustrated though I was that the gyro drift was so bad, I was able to manually generate a Plotter-compatible map. Here is the output from the VM Plotter:
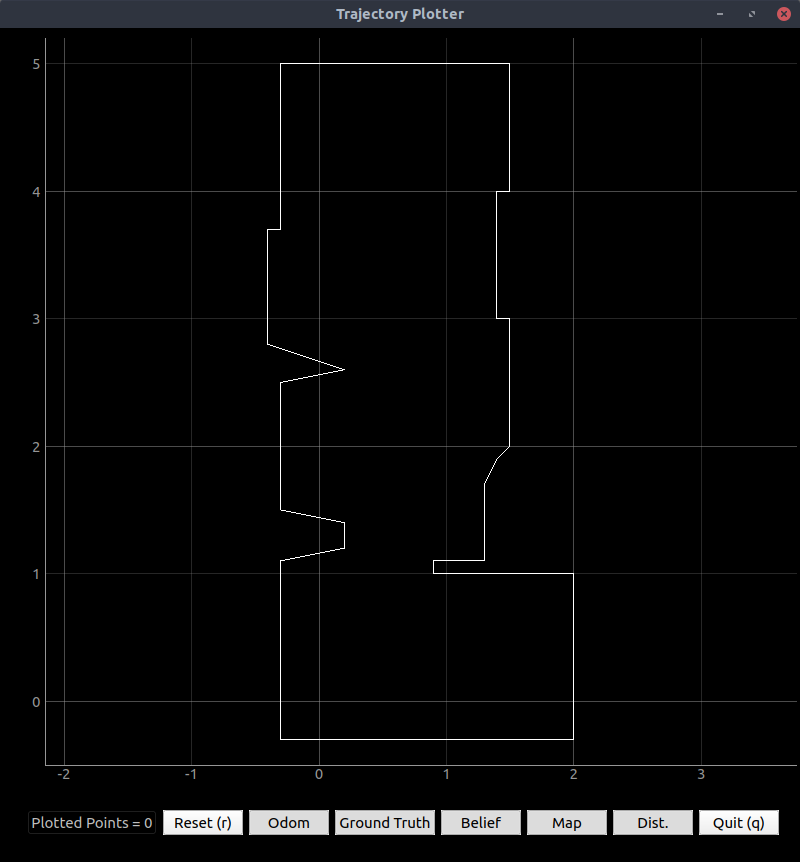 Figure 5. Map plot generated using the robot’s data with heavy reliance on the real map.
Figure 5. Map plot generated using the robot’s data with heavy reliance on the real map.
To achieve this output, I imported CSV files again:
# Start points for each line segment describing the map
start_points = np.genfromtxt("StartPoints.csv", delimiter=",")
# End points for each line segment describing the map
end_points = np.genfromtxt("EndPoints.csv", delimiter=",")
I should note that the number of ToF readings generated from each cycle is much more than 18, but isn’t a constant number. What I intend to do for the next lab is to take the median of all the readings from 10° to 30° and call that the 20° reading; take the median of readings from 30° to 50° and call that the 40° reading; etc. I want to do that because it filters out occasional outliers and is likely to give the actual distance measured at 20° rotation; if something went wrong with that point or the Bluetooth packet was dropped, the median is the next best thing. Mean would not be satisfactory because it would round out corners (such as the wall obstacle and the legs of the kitchen counter) too much. Seeing these features is important for localization.
Note that I collected data and wrote code beyond what is mentioned here; see the GitHub Lab7 folder for the slightly modified PID code, Python code to print r-θ pairs, and more.
Lab 8
Used the same materials as Labs 6 and 7.
Procedure
Downloaded the lab eight base code; extracted; ran setup.sh from the folder; closed and reopened terminal window; and ran jupyter lab from ~/catkin_ws/src/lab8/scripts.
Using pseudocode from Lab 7, wrote the following Bayes Filter code (with debugging print statements removed) in Python 3:
# Import useful Numpy functions
from numpy import arctan2, hypot, pi, deg2rad, rad2deg, arange
# and alias several functions to prevent errors later
odom_rot_sigma = loc.odom_rot_sigma
odom_trans_sigma = loc.odom_trans_sigma
sensor_sigma = loc.sensor_sigma
gaussian = loc.gaussian
normalize_angle = mapper.normalize_angle
to_map = mapper.to_map
toMap = to_map
from_map = mapper.from_map
fromMap = from_map
# In world coordinates
def compute_control(cur_pose, prev_pose):
""" Given the current and previous odometry poses, this function extracts
the control information based on the odometry motion model.
Args:
cur_pose ([Pose]): Current Pose
prev_pose ([Pose]): Previous Pose
Returns:
[delta_rot_1]: Rotation 1 (degrees)
[delta_trans]: Translation (meters)
[delta_rot_2]: Rotation 2 (degrees)
Pseudocode (well, this code probably compiles):
delta_y = cur_pose[1] - prev_pose[1]
delta_x = cur_pose[0] - prev_pose[0]
delta_rot_1 = atan2(delta_y, delta_x)
delta_trans = sqrt(delta_y^2 + delta_y^2)
delta_rot_2 = cur_pose[2] - (prev_pose[2] + delta_rot_1)
"""
dy = cur_pose[1] - prev_pose[1] # pre-compute these since they'll be
dx = cur_pose[0] - prev_pose[0] # used twice
# normalize the change in angle (could be >180°)
dTheta = normalize_angle(cur_pose[2] - prev_pose[2])
delta_rot_1 = rad2deg(arctan2(dy, dx))
delta_trans = hypot(dx, dy) # get magnitude of dx, dy
delta_rot_2 = dTheta - delta_rot_1
return delta_rot_1, delta_trans, delta_rot_2
# In world coordinates
def odom_motion_model(cur_pose, bel, u):
""" Odometry Motion Model
Args:
cur_pose ([Pose]): Current Pose (x,y,th) in meters
bel ([ndarray 20x20x18]): Belief about position from last iteration
u = (rot1, trans, rot2) (float, float, float): A tuple with control data
in the format (rot1, trans, rot2) with units (degrees, meters, degrees)
Returns:
prob [scalar float]: Probability sum over x_{t-1} (p(x'|x, u)) at the cur_pose.
Pseudocode (MODIFIED):
x, y, th = prev_pose
for prevX,prevY,prevTh in gridPoints: # use fromMap() to get these coords.
# Figure out what each movement would have been to get here
dx = x-prevX; dy = y-prevY; dth = theta-prevTh;
dtrans = sqrt(dx^2+dy^2)
drot1 = atan2(dy,dx)
drot2 = dth - rot1i
pR = gaussian(trans, dtrans, odom_trans_sigma)
pTh1 = gaussian(rot1, drot1, odom_rot_sigma)
pTh2 = gaussian(rot2, drot2, odom_rot_sigma)
pXYT = pR*pTh1*pTh2 # probability we got all three right
prob[x,y,th] = prob[x,y,th] + pXYT*bel[prevX,prevY,prevTh]
"""
# Determine what each movement would have been to get here: 20x20x18 array
# We don't know where we are or where we were, but we have
# * A guess for where we are now (cur_pose).
# * A distribution for where we were. Sum over that in this function.
drot1 = np.empty([20,20,1]) # first rotation to travel to point x,y
dtrans = np.empty([20,20,1]) # translation to travel to x,y after rotating
drot2 = np.empty([20,20,18]) # second rotation to achieve angle theta
(x,y,th) = mapper.to_map(*cur_pose) # actually the indices for x,y,th
# Use vectorized code to calculate prevX & prevY fast (prevTh is a dummy for now)
(prevX,prevY,prevTh) = mapper.from_map(arange(0,20),arange(0,20),1)
dx = cur_pose[0]-prevX # change in x position (m) - array size 20
dy = cur_pose[1]-prevY # change in y position (m) - array size 20
# ^ Just do this once. th has to be recalculated many times because
# from_map() can't handle multiple values of theta at once.
for i in range(20):
dtrans[i,:,0] = hypot(dx[i],dy) # do all of y at once; loop through x
drot1[i,:,0] = rad2deg(arctan2(dy,dx[i])) # both 20x20 arrays
for i in range(18): # loop over all angles and overwrite th
prevTh = mapper.from_map(1,1,i)[2] # don't care about 0 and 1
# Normalize the change in angle (could be >180°)
dth = normalize_angle(cur_pose[2] - prevTh)
drot2[:,:,i] = dth - drot1[:,:,0] # build the entire array!
# Probability of being in this pose given the control action taken:
# use Law of Total Probability and sum over all possible starting points.
# This is the entire RHS of the pseudocode for the prediction step.
prob = sum(sum(sum(
gaussian(u[0], drot1, odom_rot_sigma)
* gaussian(u[1], dtrans, odom_trans_sigma)
* gaussian(u[2], drot2, odom_rot_sigma)
* bel )))
return prob
def prediction_step(cur_odom, prev_odom, bel):
""" Prediction step of the Bayes Filter.
Update the probabilities in loc.bel_bar based on loc.bel (bel)
from the previous time step and the odometry motion model.
Args:
cur_odom ([Pose]): Current pose, estimated from odometry
prev_odom ([Pose]): Previous pose, estimated from odometry
loc.bel [ndarray 20x20x18]: Previous location probability density
Returns:
loc.bel_bar [ndarray 20x20x18]: Updated location probability density.
This will be the prior belief for the update step.
Pseudocode (FIXED):
for x, y, theta in configuration space:
loc.bel_bar[x,y,theta] = odom_motion_model((x,y,th),bel,u)
# Plugs in all possible current values (t).
# odom_motion_model() takes care of
# summing over all possible previous values (t-1).
"""
u = compute_control(cur_odom,prev_odom) # What control action did we take?
bel_bar = np.zeros([20,20,18]) # Initialize prior belief with correct dims
for k in range(18): # loop over all possible current poses,
for j in range(20): # in configuration space
for i in range(20):
pose = mapper.from_map(i,j,k) # from config space to world
# odom_motion_model sums probability of getting here from
# all possible previous poses
bel_bar[i,j,k] = odom_motion_model(pose,bel,u)
# so bel_bar is the probability of being at indices i,j,k
return bel_bar
def sensor_model(obs):
""" This is the equivalent of p(z|x). Checks all possible poses x_t.
Args:
obs [ndarray]: A 1D array consisting of the measurements made in rotation loop
1D array of size 18 (=loc.OBS_PER_CELL)
Returns:
probArray [ndarray]: Returns a 20x20x18 array corresponding to
p(z_t|x_t) for all values of x_t.
Pseudocode:
(x,y,theta) = cur_pose
for i in range(18):
d = getViews(x,y,theta)
probArray[i] = gaussian(obs[i], d, sensor_sigma)
"""
probArray = gaussian(obs[0], mapper.obs_views[:,:,:,0],sensor_sigma)
for i in range(1,18): # Probability of getting ALL the sensor readings
# p(z1 & z2 & ...) = p(z1)p(z2)...
probArray = probArray*gaussian(obs[i], mapper.obs_views[:,:,:,i],sensor_sigma)
# this is elementwise multiplication
probArray = probArray / sum(sum(sum(probArray))) # normalized probability
# need to sum over all three indices to get total
return probArray
# In configuration space
def update_step(bel_bar, obs):
""" Update step of the Bayes Filter.
Update the probabilities in loc.bel based on loc.bel_bar and the sensor model.
Args:
loc.bel_bar [ndarray 20x20x18]: belief after prediction step
obs [ndarray]: A 1D array consisting of the measurements made in rotation loop
Returns:
loc.bel [ndarray 20x20x18]: belief after update step
Pseudocode:
loc.bel = sensorModel(obs)*loc.bel_bar
eta = 1/sum(loc.bel) # normalization constant
loc.bel = loc.bel*eta
"""
bel = sensor_model(obs)*bel_bar
bel = bel/sum(sum(sum(bel))) # normalized
# need to sum over all three indices to get total
return bel
(Optional) Added code to the overall Bayes filter loop to time each step.
tic = time.clock_gettime(time.CLOCK_MONOTONIC)
loc.bel_bar = prediction_step(current_odom, prev_odom, loc.bel)
loc.print_prediction_stats(plot_data=True)
toc = time.clock_gettime(time.CLOCK_MONOTONIC)
print("Prediction step time: {} s".format(toc-tic))
Results and Lessons Learned
I didn’t fully understand the syntax when I started; when I ran the cells of the Jupyter notebook in the wrong order, I received an error that loc (the BaseLocalization object) had not been initialized. Since I was used to Matlab coding, I believed this was a shared variable issue and changed the names of the function parameters to bel and bel_bar so as not to cause a conflict. However, the function output was not passed to a variable in the main code, so this didn’t work and I received strange results. Of course, when I assigned the variables their values, the filter gave more reasonable results.
Before: prediction_step(current_odom, prev_odom, loc.bel)
After: loc.bel_bar = prediction_step(current_odom, prev_odom, loc.bel)
Before: update_step(loc.bel_bar, loc.obs_range_data)
After: loc.bel = update_step(loc.bel_bar, loc.obs_range_data)
Even after an hour of accumulating error in the odometry readings (my third debugging session), the Bayes filter handled it well.
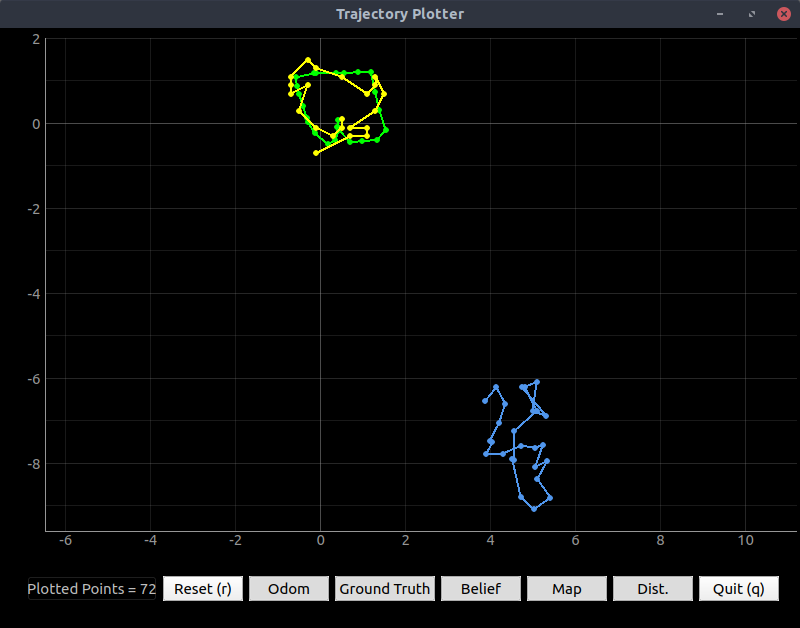 Figure 1. First run of the Bayes filter algorithm in which it gave expected readings. Belief is yellow; odometry readings are blue; and ground truth is green.
Figure 1. First run of the Bayes filter algorithm in which it gave expected readings. Belief is yellow; odometry readings are blue; and ground truth is green.
Restarting the simulator and resetting everything gave better results.
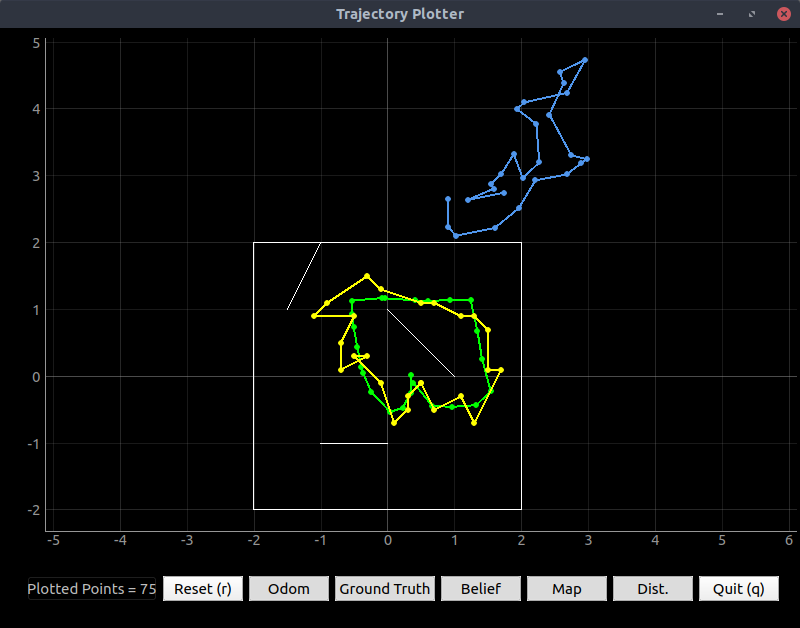 Figure 2. Another run of the Bayes filter algorithm after a full reset. Belief is yellow; odometry readings are blue; and ground truth is green.
Figure 2. Another run of the Bayes filter algorithm after a full reset. Belief is yellow; odometry readings are blue; and ground truth is green.
For debugging purposes, I changed the robot_interface.py code to print more decimal places in probabilities:
print("Prior Bel index : ({},{},{}) with prob = {:.4f}".format(
*argmax_bel_bar[0], argmax_bel_bar[1]))
# other code
print("Bel index : ({},{},{}) with prob = {:.4f}".format(
*argmax_bel[0], argmax_bel[1]))
print("Bel_bar prob at index = {:.4f}".format(self.bel_bar[argmax_bel[0]]))
I found that my sensor model was quite efficient since I took the TA’s advice; however, my motion model was so construed that it recomputed the same numbers 7,200 (=18 × 20 × 20) times each iteration, so it took 10-12 seconds to run each iteration of the filter code.
----------------- 1 -----------------
---------- PREDICTION STATS -----------
GT index : (13, 7, 8)
Prior Bel index : (9,8,6) with prob = 0.8336
POS ERROR : (0.772, -0.145, 44.843)
---------- PREDICTION STATS -----------
Prediction step time: 10.677906151999196 s
| Executing Observation Loop at: 30 deg/s
---------- UPDATE STATS -----------
GT index : (13, 7, 8)
Bel index : (13,8,8) with prob = 1.0000
Bel_bar prob at index = 0.0000
GT : (0.672, -0.445, -2.157)
Belief : (0.700, -0.300, -10.000)
POS ERROR : (-0.028, -0.145, 7.843)
---------- UPDATE STATS -----------
Update step time: 0.028990982999857806 s
-------------------------------------
Sometimes the belief probability is not so close to 1:
----------------- 6 -----------------
---------- PREDICTION STATS -----------
GT index : (16, 13, 15)
Prior Bel index : (17,13,14) with prob = 0.9786
POS ERROR : (-0.272, -0.008, 12.601)
---------- PREDICTION STATS -----------
Prediction step time: 11.915527201999794 s
| Executing Observation Loop at: 30 deg/s
---------- UPDATE STATS -----------
GT index : (16, 13, 15)
Bel index : (15,14,15) with prob = 0.9999
Bel_bar prob at index = 0.0038
GT : (1.228, 0.692, 125.601)
Belief : (1.100, 0.900, 130.000)
POS ERROR : (0.128, -0.208, -4.399)
---------- UPDATE STATS -----------
Update step time: 0.03112747799968929 s
-------------------------------------
Reasons for Inaccuracy
The Bayes filter’s resolution is limited to that of the grid. As shown above, the grid has a precision of 0.2 meter, so the Bayes filter algorithm is expected to give errors of up to 0.2 meter. Much of the error here may be attributed to this resolution, as the real trajectory often passes between two successive believed positions.
When the filter gives a position which is off by more than one 0.2m square, the odometry is the obvious culprit. The odometry data graph is usually upside-down and contorted. Since the Bayes filter begins with the prediction based on odometry, even a perfect sensor model won’t necessarily tell the robot where it is. For instance, if the robot sees a wall in front and orthogonal, and a wall behind at 45°, there are several places it could be; the motion model must give reasonable results to achieve an accurate location. If the robot turned +90° but the odometry model shows it turned -45°, then the belief of being at the ground-truth position will be reduced.
Performance
I double-checked that I am running the update step correctly. It is much shorter, more elegant code than the prediction step is. Since it’s shorter, and it uses Numpy array to do nearly everything, it is much faster. How much?
| Step | Prediction Time |
|---|---|
| 0 | 10.8624686610001 |
| 1 | 11.210937152 |
| 2 | 10.0682631970012 |
| 3 | 10.1311731939986 |
| 4 | 10.1318369469991 |
| 5 | 9.99874743999862 |
| 6 | 10.0988965329998 |
| 7 | 12.8323976009997 |
| 8 | 10.7474872099992 |
| 9 | 10.9461809029999 |
| 10 | 10.7700454719998 |
| 11 | 10.7374321020016 |
| 12 | 12.2810243210006 |
| 13 | 11.8426394750004 |
| 14 | 10.1277149460002 |
| 15 | 12.6775384369994 |
| 16 | 10.7251422659992 |
| 17 | 12.0187401500007 |
| 18 | 12.8803950340007 |
| 19 | 10.4697853159996 |
| 20 | 10.470596485 |
| 21 | 10.4692385599992 |
| 22 | 10.4697699669996 |
| 23 | 10.4038207280009 |
| 24 | 10.2991401439995 |
| 25 | 10.3891734570007 |
| Total | 284.060585697998 |
The entire loop took 660 seconds (11 minutes) to run, so nearly half of the trajectory time was spent calculating the motion model. The prediction step time ranged from 10 to 13 seconds, but the update step time ranged from 0.022 to 0.045 seconds.
Adding code to compute steps only when the likelihood of the starting position was low reduced the computing time by a factor of 20:
def prediction_step(cur_odom, prev_odom, bel):
u = compute_control(cur_odom,prev_odom) # What control action did we take?
bel_bar = np.zeros([20,20,18]) # Initialize prior belief with correct dims
for k in range(18): # loop over all possible current poses,
for j in range(20): # in configuration space
for i in range(20):
pose = mapper.from_map(i,j,k) # from config space to world
# Do a quick calculation of starting point
xLast = pose[0] - u[1]*cos(deg2rad(pose[2]-u[2])) # robot retraces
yLast = pose[1] - u[1]*sin(deg2rad(pose[2]-u[2])) # its steps
thLast = pose[2] - u[2] - u[0] # so order is reversed
(iLast,jLast,kLast) = mapper.to_map(xLast, yLast, thLast)
if (iLast < 0 or iLast > 19 or jLast < 0 or jLast > 19 or kLast < 0 or kLast > 17):
bel_bar[i,j,k] = small
elif (bel[iLast,jLast,kLast] < threshold):
bel_bar[i,j,k] = small
else: # We've decided the probability is worth computing.
# odom_motion_model sums probability of getting here from
# all possible previous poses
bel_bar[i,j,k] = odom_motion_model(pose,bel,u)
# so bel_bar is the probability of being at indices i,j,k
return bel_bar
As shown in the below output, the computation time dropped to about 0.5 second, while the accuracy seemed the same as before.
----------------- 0 -----------------
| Resetting Robot pose
---------- PREDICTION STATS -----------
GT index : (11, 9, 7)
Prior Bel index : (0,0,0) with prob = 0.000000
POS ERROR : (2.289, 1.805, 147.082)
---------- PREDICTION STATS -----------
Prediction step time: 0.553617714000211 s
| Executing Observation Loop at: 30 deg/s
---------- UPDATE STATS -----------
GT index : (11, 9, 8)
Bel index : (12,9,8) with prob = 1.000000
Bel_bar prob at index = 0.000000
GT : (0.389, -0.095, -16.918)
Belief : (0.500, -0.100, -10.000)
POS ERROR : (-0.111, 0.005, -6.918)
---------- UPDATE STATS -----------
Update step time: 0.03251633400032006 s
-------------------------------------
----------------- 1 -----------------
---------- PREDICTION STATS -----------
GT index : (13, 7, 9)
Prior Bel index : (10,8,9) with prob = 0.755357
POS ERROR : (0.604, -0.116, -9.730)
---------- PREDICTION STATS -----------
Prediction step time: 0.5875632839997706 s
| Executing Observation Loop at: 30 deg/s
---------- UPDATE STATS -----------
GT index : (13, 7, 9)
Bel index : (12,7,8) with prob = 1.000000
Bel_bar prob at index = 0.000000
GT : (0.704, -0.416, 3.270)
Belief : (0.500, -0.500, -10.000)
POS ERROR : (0.204, 0.084, 13.270)
---------- UPDATE STATS -----------
Update step time: 0.029232034999949974 s
-------------------------------------
----------------- 2 -----------------
---------- PREDICTION STATS -----------
GT index : (15, 8, 9)
Prior Bel index : (10,6,8) with prob = 0.295517
POS ERROR : (0.903, 0.301, 19.458)
---------- PREDICTION STATS -----------
Prediction step time: 0.5740839580003012 s
| Executing Observation Loop at: 30 deg/s
---------- UPDATE STATS -----------
GT index : (15, 8, 9)
Bel index : (15,8,9) with prob = 1.000000
Bel_bar prob at index = 0.000000
GT : (1.003, -0.399, 15.458)
Belief : (1.100, -0.300, 10.000)
POS ERROR : (-0.097, -0.099, 5.458)
---------- UPDATE STATS -----------
Update step time: 0.039681067999481456 s
-------------------------------------
As this test showed, much of the computing time was spent computing probabilities which were bound to be very low.
See the rest of my code and screenshots here on Github.
Lab 9
Materials: same as in previous labs.
Procedure
Downloaded and extracted the lab 9 base code. Ran setup.sh in the appropriate directory and restarted the terminal. Wrote needed code, debugged, and gathered results. Ran jupyter lab in ~/catkin_ws/src/lab9/scripts/ and ran the Bayes filter code in a terminal window outside of the Jupyter notebook. Tested the Bayes filter two ways:
- Init only: one update step and no movement or prediction step.
- Init and one step: update, move, predict, and update again.
Started the robot at approximately (x,y,θ) = (0,0,0) in the map frame each time to test the reliability of the Bayes filter.
Results
I used test scripts like the following to debug my code:
#!/usr/bin/python3
#import testOdom
import commander
#readings = testOdom.testMyCode()
readings = commander.observationLoop()
# The first reading needs to be in the direction
# of the robot's original heading.
# But, out has readings at angles 20:20:360.
#readings.insert(0, readings.pop(-1)) # move the last element to the front
print(readings)
#print(commander.returnPose())
#commander.move(0, 100, 1)
artemis@artemis-VirtualBox:~/Shared/ECE4960/Lab9$ ./test.py
[(1.0, 656.0), (21.0, 736.0), (41.0, 1245.0), (61.0, 1889.0), (81.0, 0.0), (101.0, 0.0), (121.0, 1365.0), (141.0, 1801.0), (162.0, 1106.0), (182.0, 874.0), (201.0, 730.0), (221.0, 1251.0), (241.0, 1395.0), (261.0, 526.0), (281.0, 1512.0), (301.0, 894.0), (321.0, 643.0), (341.0, 577.0)]
I struggled for a long time to call the Bluetooth asyncio-based code from a procedural external function; of great help were the asyncio documentation and Dan’s cheat sheet on asyncio. When I made it work, I tested it in a terminal window (not in a Jupyter notebook); running it in the Jupyter notebook gave error messages like RuntimeError: This event loop is already running. The event loop which was running was that of IPython, which powers the Jupyter Notebook. I could not start a new event loop from a running event loop in IPython, so I ran the code in a terminal window for the rest of the lab. Below were the results of the first “successful” run.
artemis@artemis-VirtualBox:~/Shared/ECE4960/Lab9$ ./realRobot.py
Using python version: 3.6.9 (default, Oct 8 2020, 12:12:24)
[GCC 8.4.0]
Initializing Node
Initializing Real Robot
Initializing beliefs with a Uniform Distribution
Uniform Belief with each cell value: 0.00017806267806267807
| Precaching Views...
| Precaching Time: 29.009833812713623
Initializing beliefs with a Uniform Distribution
Uniform Belief with each cell value: 0.00017806267806267807
Update Step
/home/artemis/Shared/ECE4960/Lab9/robot_interface.py:570: RuntimeWarning: invalid value encountered in true_divide
self.bel = self.bel / np.sum(self.bel)
| Update Time: 0.005212068557739258
---------- UPDATE STATS -----------
GT index : (-2211, 673, 7)
Bel index : (0, 0, 0) with prob = nan
Bel_bar prob at index = 0.00017806267806267807
GT : (-443.591, 132.157, 327.692)
Belief : (-0.300, -0.200, -170.000)
POS ERROR : (-443.291, 132.357, 497.692)
---------- UPDATE STATS -----------
Repeatedly, the robot’s belief had a probability of nan, throwing a warning RuntimeWarning: invalid value encountered in true_divide.
With some debugging, I saw that the probabilities were vanishingly small and thus the normalization returned NaN because the sum of the probabilities was zero. I realized that the map was in meters, but I was still returning ranges in millimeters, so the three-orders-of-magnitude difference caused the probability to underflow. After fixing this issue, I started getting sensible results.
artemis@artemis-VirtualBox:~/Shared/ECE4960/Lab9$ ./realRobot.py
Using python version: 3.6.9 (default, Oct 8 2020, 12:12:24)
[GCC 8.4.0]
Initializing Node
Initializing Real Robot
Initializing beliefs with a Uniform Distribution
Uniform Belief with each cell value: 0.00017806267806267807
| Precaching Views...
| Precaching Time: 29.22792935371399
Initializing beliefs with a Uniform Distribution
Uniform Belief with each cell value: 0.00017806267806267807
Update Step
| Update Time: 0.017453432083129883
---------- UPDATE STATS -----------
GT index : (-1492, -37, 6)
Bel index : (8, 3, 0) with prob = 0.7018934
Bel_bar prob at index = 0.00017806267806267807
GT : (-299.758, -10.164, 319.688)
Belief : (1.300, 0.400, -170.000)
POS ERROR : (-301.058, -10.564, 489.688)
---------- UPDATE STATS -----------
...
artemis@artemis-VirtualBox:~/Shared/ECE4960/Lab9$ ./realRobot.py
Using python version: 3.6.9 (default, Oct 8 2020, 12:12:24)
[GCC 8.4.0]
Initializing Node
Initializing Real Robot
Initializing beliefs with a Uniform Distribution
Uniform Belief with each cell value: 0.00017806267806267807
| Precaching Views...
| Precaching Time: 27.403477907180786
Initializing beliefs with a Uniform Distribution
Uniform Belief with each cell value: 0.00017806267806267807
Update Step
| Update Time: 0.014315605163574219
---------- UPDATE STATS -----------
GT index : (1844, 111, 9)
Bel index : (10, 4, 17) with prob = 0.9999905
Bel_bar prob at index = 0.00017806267806267807
GT : (367.607, 19.764, 369.258)
Belief : (1.700, 0.600, 170.000)
POS ERROR : (365.907, 19.164, 199.258)
---------- UPDATE STATS -----------
artemis@artemis-VirtualBox:~/Shared/ECE4960/Lab9$ ./realRobot.py
Using python version: 3.6.9 (default, Oct 8 2020, 12:12:24)
[GCC 8.4.0]
Initializing Node
Initializing Real Robot
Initializing beliefs with a Uniform Distribution
Uniform Belief with each cell value: 0.00017806267806267807
| Precaching Views...
| Precaching Time: 29.795493364334106
Initializing beliefs with a Uniform Distribution
Uniform Belief with each cell value: 0.00017806267806267807
Update Step
| Update Time: 0.004567146301269531
---------- UPDATE STATS -----------
GT index : (-2593, -111, 8)
Bel index : (1, 12, 8) with prob = 0.9997010
Bel_bar prob at index = 0.00017806267806267807
GT : (-519.871, -24.925, 355.355)
Belief : (-0.100, 2.200, -10.000)
POS ERROR : (-519.771, -27.125, 365.355)
---------- UPDATE STATS -----------
The above should all read about 0,0,0 since the robot was facing in the positive direction from very close to the map’s origin. It doesn’t; often it thinks it’s in the wrong corner.

Figure 1. The robot believes it’s in one corner but actually it’s in another (real position about 0,0).
The robot’s turn radius seemed to interfere with its ability to accurately measure the distance from walls. In the mapping lab, I compensated for the turn radius since it was consistent and small. I’m not sure how to do that in this lab since the readings directly factor into the Bayes filter. I also can’t make the robot spin in place perfectly, because that would require spinning too fast. So I allowed the robot to “swing turn”, realizing this would make it think it was too close to the wall.
This wasn’t a huge problem. Executing the 0th update step, and the first prediction step and the first update step worked, though slowly due to disconnections and reconnections:
Figure 2 shows the results of this run:
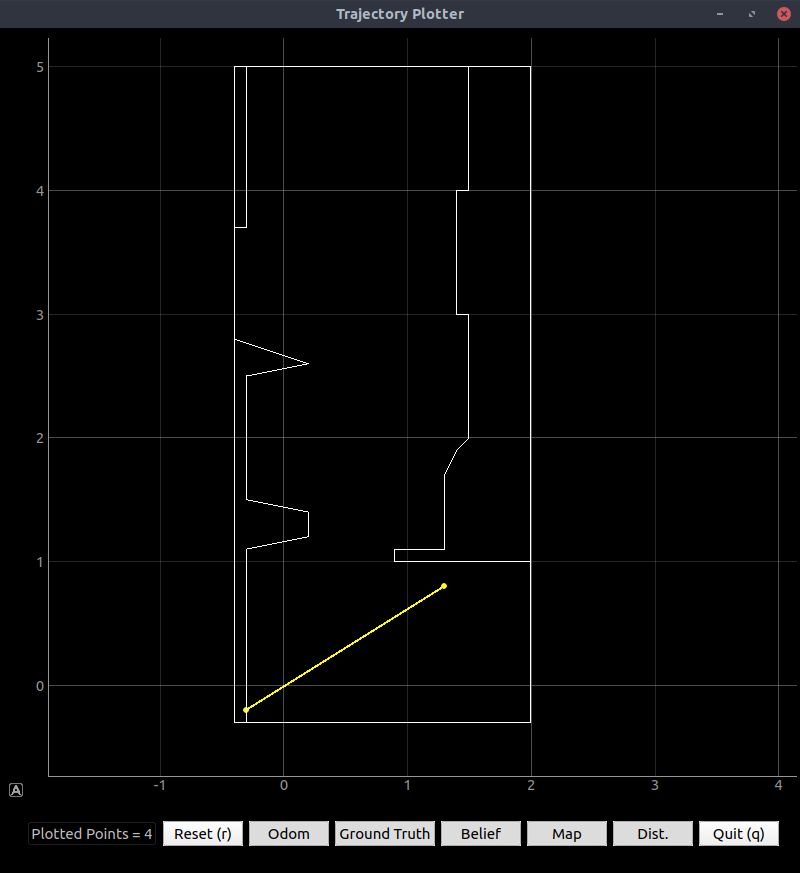
Figure 2. The robot was pretty much right, but it thought it was too close to the wall.
Note that the odometry and “ground truth” values were far off the map, and thus the bel_bar probability summed to zero.
artemis@artemis-VirtualBox:~/Shared/ECE4960/Lab9$ ./realRobot.py
Using python version: 3.6.9 (default, Oct 8 2020, 12:12:24)
[GCC 8.4.0]
Initializing Node
Initializing Real Robot
Initializing beliefs with a Uniform Distribution
Uniform Belief with each cell value: 0.00017806267806267807
| Precaching Views...
| Precaching Time: 26.63333487510681
Initializing beliefs with a Uniform Distribution
Uniform Belief with each cell value: 0.00017806267806267807
Update Step
| Update Time: 0.0166933536529541
---------- UPDATE STATS -----------
GT index : (2618, 40, 8)
Bel index : (8, 5, 0) with prob = 0.9914363
Bel_bar prob at index = 0.00017806267806267807
GT : (522.549, 5.599, 351.045)
Belief : (1.300, 0.800, -170.000)
POS ERROR : (521.249, 4.799, 521.045)
---------- UPDATE STATS -----------
Prediction Step
Uniform Belief with each cell value: 0.0
/home/artemis/Shared/ECE4960/Lab9/robot_interface.py:557: RuntimeWarning: invalid value encountered in true_divide
self.bel_bar = self.bel_bar / np.sum(self.bel_bar)
| Prediction Time: 0.8416004180908203
---------- PREDICTION STATS -----------
GT index : (-4362, 4099, 7)
Prior Bel index : (0, 0, 0) with prob = nan
POS ERROR : (-873.324, 817.528, 861.408)
Service call failed: service [/plot_prob_dist] responded with an error: b'error processing request: cannot reshape array of size 312 into shape (20,20)'
---------- PREDICTION STATS -----------
Update Step
| Update Time: 0.018723487854003906
---------- UPDATE STATS -----------
GT index : (-9448, 6677, 7)
Bel index : (0, 0, 0) with prob = nan
Bel_bar prob at index = nan
GT : (-1890.968, 1332.828, 1049.506)
Belief : (-0.300, -0.200, -170.000)
POS ERROR : (-1890.668, 1333.028, 1219.506)
---------- UPDATE STATS -----------
So, bad odometry steals first place for the biggest contribution to error. It should be the case that the prediction step widens the belief distribution, and the update step narrows it; while the update step doesn’t narrow the distribution as much as it should, there is nothing to narrow if the probabilities from the prediction step are all astronomically tiny.
I am continuing to work on ways to improve the odometry data. Thus far, I am taking two main steps:
1.. Calibration. The average initial offsets, calculated in setup(), are subtracted away in the loop.
aCX = 10*(aX-aXCal); // acceleration, calibrated but ignoring rotation
v = v + aCX*dt; // integrate to get velocity...
X = X + v*cos(yaw*deg2rad)*dt; // and integrate again (in polar coordinates) to get position.
Y = Y + v*sin(yaw*deg2rad)*dt;
2.. Allowing integration only while the velocity is moving, and then limiting the velocity to the robot’s maximum possible speed.
if(pid){ // As long as we're running the controller,
...
if (r[0] !=0){ // If a nonzero linear velocity is requested,
...
if (v > maxSpeed) // Sanity check on velocity reading - avoid quadratic error integration
v = maxSpeed;
else if (v < -maxSpeed)
v = -maxSpeed;
else
v = v + aCX*dt; // If robot is moving (with PID), integrate to get velocity
}
else{ // spinning in place; ignore linear velocity
...
v = 0; // linear velocity assumed zero
}
...
}
else{ // controller isn't running; motors are stopped
// and reset odometry velocity reading
v = 0;
}
Also note that pid is initialized as false.
Planned improvements, in order of priority:
Implementing a low-pass filter on all IMU readings, not only those going into the PID controller (in C).Tuning the low-pass filter.Rewriting my code to maintain a connection with the robot rather than dropping it after each action (in Python).- Factoring magnetometer data into the yaw reading to limit drift (in C).
More Implementation Details
Below is my entire code to make the Artemis handle SET_VEL and other PID-related requests. Note the implementation of a FLIPPED macro which allowed tests to be run with the robot upside-down for better sensor positioning:
void loop(){
...
case SET_VEL:
{
for(byte i=0; i<2; i++){
r[i] = ((float*)cmd->data)[i];
Serial.printf("r[%d] = %3.2f\n",i,r[i]);
}
if (r[0] == 0 && r[1] == 0){ // Special case: stopping robot completely
pid = false;
scmd.setDrive(left,0,0);
scmd.setDrive(right,0,0);
Serial.println("Stopping robot.");
}
else{
pid = true;
Serial.println("Starting PID-controlled movement.");
}
break;
}
case GET_VEL:
{
Serial.println("Going to send current linear and angular rates");
res_cmd->command_type = GET_VEL;
bytestream_active = 4; // the angles are 32-bit floats
((uint32_t *)res_cmd->data)[0] = 0;
break;
}
case SET_GAINS:
{
// Sets PID gains for linear (0) and angular (1) velocity control
for(byte i=0; i<2; i++){
kp[i] = ((float*)cmd->data)[3*i];
ki[i] = ((float*)cmd->data)[3*i+1];
kd[i] = ((float*)cmd->data)[3*i+2];
}
Serial.printf("Linear: Kp = %3.2f, Ki = %3.2f, Kd = %3.2f\n",kp[0],ki[0],kd[0]);
Serial.printf("Angular: Kp = %3.2f, Ki = %3.2f, Kd = %3.2f\n",kp[1],ki[1],kd[1]);
break;
}
case SER_RX:
{
Serial.println("Got a serial message");
pushMessage((char *)&cmd->data, cmd->length);
break;
}
case GET_ODOM:
{
#ifdef SERIAL_DEBUG
Serial.println("Going to send current R, P, and Y angles");
#endif
res_cmd->command_type = GET_ODOM;
//res_cmd->length = 6;
//((float *) res_cmd->data)[0] = yaw; // send current yaw (a float)
//amdtpsSendData((uint8_t *)res_cmd, res_cmd->length);
bytestream_active = 4; // the angles are 32-bit floats
((uint32_t *)res_cmd->data)[0] = 0;
break;
}
...
if (res_cmd->command_type==GET_ODOM){
data32[0] = X; //update Bluetooth data
data32[1] = Y;
data32[2] = yaw;
}
else if (res_cmd->command_type==GET_VEL){
// Give raw values (but with calibration offset)
data32[0] = v; // Raw X velocity
data32[1] = 0; // Y velocity (sideways) assumed zero
data32[2] = omZ;
}
...
// Handle PID command
if(pid){ // As long as we're running the controller,
for(int i=0; i<2; i++){ // run two separate controllers for linear (0) and angular (1)
eLast[i] = e[i]; // Update error (but don't update time - this is already done in the gyro section)
//tLast = t;
//t = micros();
//dt = (t - tLast)*0.000001;
if(i){ // if this is the angular controller
e[i] = alphaE[i]*(r[i]-omZ)+(1-alphaE[i])*eLast[i]; // lag filter on error
}else{ // if this is the linear controller
e[i] = alphaE[i]*(r[i]-v)+(1-alphaE[i])*eLast[i]; // lag filter on error
}
inte[i] = inte[i] + e[i]*dt; // integral term
de = e[i] - eLast[i]; // numerator of deriv. term
if (inte[i] > 127) // anti-windup control for integral
inte[i] = 127;
else if (inte[i] < -127)
inte[i] = -127;
output[i] = kp[i]*e[i]+ki[i]*inte[i]+kd[i]*(de/dt); // calculate output
}
#ifdef SERIAL_PID
Serial.printf("P = %3.1f, I = %3.1f, D = %3.1f\n",kp[1]*e[1], ki[1]*inte[1], kd[1]*((e[1]-eLast[1])/dt));
#endif
/* Remember: clockwise is direction 1.
Right goes full power forward for 255 and backward for 0.
Left goes full power backward for 255 and forward for 0.
When the robot is flipped, right becomes left and vice versa, so the opposite is true.
However, for spinning, the robot actually spins in the same direction, from the floor's perspective, regardless of
which way is up. */
if (r[0] !=0){ // If a nonzero linear velocity is requested,
for(int i=0; i<2; i++){ // combine outputs from linear and angular PID controllers
int sign = pow(-1, (float) i+FLIPPED); // -1^(i+1) so -1 for i=0; 1 for i=1
// I couldn't make PID control with the accelerometer work, so I'm using open-loop.
// Proportional gain is the multiplier (H) for the reference input.
power[i] = sign*kp[0]*r[0] + output[1] + 127; // flip x output as appropriate
}
if (v > maxSpeed) // Sanity check on velocity reading - avoid quadratic error integration
v = maxSpeed;
else if (v < -maxSpeed)
v = -maxSpeed;
else
v = v + aCX*dt; // If robot is moving (with PID), integrate to get velocity
}
else{ // spinning in place; ignore linear velocity
for(int i=0; i<2; i++){
power[i] = output[1] + 127; // forward on both sides, and the bot spins CCW
}
v = 0; // linear velocity assumed zero
}
for(int i=0; i<2; i++){ // update motor powers
if (power[i] > 255)
power[i] = 255;
else if(power[i] < 0)
power[i] = 0;
else
power[i] = power[i];
scmd.writeRegister(SCMD_MA_DRIVE+i,power[i]); // the driver accepts a value 0-255
}
}
else{ // controller isn't running; motors are stopped
// and reset odometry velocity reading
v = 0;
}
// Odometry with accelerometer
X = X + v*cos(yaw*deg2rad)*dt; // Integrate again (in polar coordinates) to get position.
Y = Y + v*sin(yaw*deg2rad)*dt;
// Controlled loop time rather than simple delay
dtPre = 0.001*(micros()-tLast); // loop time thus far, milliseconds
if (dtPre < tWait) // if we haven't yet waited tWait ms
delay(tWait-dtPre); // regardless of what else runs, delay a bit before the next loop iteration
} //END LOOP
The odometry data is always streaming to the computer over Bluetooth as long as GET_ODOM is the command signal. The odometry data actually includes a ToF reading as well, so only one type of packet is needed. I chose not to save up all the observation loop readings on the robot since the reliability of Bluetooth commmunication was not great according to my tests. Instead, I used Python code to command the robot to spin, send back odometry and ToF data, and then stop spinning. Since the data was always streaming to the computer, the computer predictably got more than 18 ToF readings, with their associated headings; then, the Python code determined which ToF readings to keep based on the robot’s heading when it took them.
def observationLoop():
global odomList # list of (theta, range) tuples
loop = asyncio.get_event_loop()
try:
loop.run_until_complete(robotRun(loop,"obsLoop")) # and run the tasks.
except RuntimeError:
obsLoop = loop.create_task(robotRun(loop,"obsLoop")) # and run the tasks.
while not obsLoop.done():
time.sleep(0.05)
'''Post-process the angle array.'''
length = len(odomList) # number of entries in list
out = [] # output list
for i in range(length): # loop through the entire list after spinning
currAngle = round(odomList[i][0]) # current angle (integer)
if (currAngle%20 == 0) and (currAngle/20 == len(out)-1):
# if the angle is a multiple of 20° AND we haven't already checked it
#out.append((currAngle,odomList[i])) # for debugging
out.append(odomList[i][1]/1000) # save the angle and the range IN M
elif currAngle/20 > (len(out)): # if we skipped one
j = i
angleJ = round(odomList[j][0])
while angleJ < (len(out)+1):
j = j - 1 # average two closest angles
angleJ = abs(round(odomList[j][0]))
r = 0.5*odomList[i][1]+0.5*odomList[j][1]
th = 0.5*currAngle + 0.5*angleJ
#out.append((th,r)) # debugging
out.append(r/1000) # /1000 since measurements are in mm and we want m
return out
The robotRun asynchronous task takes a parameter which tells it which routine to run.
async def robotRun(loop, order):
...
async def setVel():
# Tell the robot how fast to drive (or stop)
global odomChanged
data = pack("<ff", rX, rTh)
length = 8 # Two four-byte numbers
await theRobot.sendCommand(Commands.SET_VEL,length,data)
async def spin():
global odomd, odomList, rX, rTh, kpX, kiX, kdX, kpTh, kiTh, kdTh
# Send control gains
data = pack("<ffffff", kpX, kiX, kdX, kpTh, kiTh, kdTh)
length = 24 # Six four-byte numbers
await theRobot.sendCommand(Commands.SET_GAINS,length,data)
await theRobot.sendCommand(Commands.GET_ODOM)
while odomd[2] == 0: # wait for values to come
if(theRobot.availMessage()): # but still check for BT messages
print(f"BTDebug: {theRobot.getMessage()}")
await asyncio.sleep(0.1)
#print("Waiting for angle...") # for debugging
angStart = odomd[2]
#print(angStart) # for debugging
rTh = 30 # spin at 30°/second counterclockwise (CCW = +, CW = -)
# Send the velocity command
data = pack("<ff", rX, rTh)
length = 8 # Two four-byte numbers
await theRobot.sendCommand(Commands.SET_VEL,length,data)
ang = 0
while ang < 360: # Run until the robot has made a full turn
ang = abs(odomd[2] - angStart) # update relative turn amount (strictly positive)
odomList.append((ang,odomd[3])) # save the RELATIVE angle and range to the list
#print(ang) # for debugging
if(theRobot.availMessage()):
print(f"BTDebug: {theRobot.getMessage()}")
await asyncio.sleep(0.02)
rTh = 0 # Stop the robot
# Send the velocity command
data = pack("<ff", rX, rTh)
length = 8 # Two four-byte numbers
await theRobot.sendCommand(Commands.SET_VEL,length,data)
async def drive():
global rX, rTh, howLong, kpX, kiX, kdX, kpTh, kiTh, kdTh
# Send control gains
data = pack("<ffffff", kpX, kiX, kdX, kpTh, kiTh, kdTh)
length = 24 # Six four-byte numbers
await theRobot.sendCommand(Commands.SET_GAINS,length,data)
# Request odometry data
await theRobot.sendCommand(Commands.GET_ODOM)
while odomd[2] == 0: # wait for values to come
if(theRobot.availMessage()): # while waiting, check for BT messages
print(f"BTDebug: {theRobot.getMessage()}")
await asyncio.sleep(0.1)
# Send the velocity command (don't care what it is - set elsewhere)
data = pack("<ff", rX, rTh)
length = 8 # Two four-byte numbers
await theRobot.sendCommand(Commands.SET_VEL,length,data)
tStart = time.monotonic()
t = 0
while t < howLong: # wait for values to come
if(theRobot.availMessage()): # while waiting, check for BT messages
print(f"BTDebug: {theRobot.getMessage()}")
await asyncio.sleep(0.1)
t = time.monotonic()-tStart # watch the time too
rX = 0
rTh = 0 # Stop the robot
# Send the velocity command
data = pack("<ff", rX, rTh)
length = 8 # Two four-byte numbers
await theRobot.sendCommand(Commands.SET_VEL,length,data)
async def odom():
global odomd
await theRobot.sendCommand(Commands.GET_ODOM)
while odomd[2] == 0: # wait for values to come
if(theRobot.availMessage()): # but still check for BT messages
print(f"BTDebug: {theRobot.getMessage()}")
await asyncio.sleep(0.1)
#print("Waiting for angle...") # for debugging
# and the output is printed to a global variable.
# You can put a UUID (MacOS) or MAC address (Windows and Linux)
# in Settings["Cached"].
if (not Settings["cached"]):
theRobot_bt = await getRobot()
else:
theRobot_bt = type("", (), {})()
theRobot_bt.address = Settings["cached"]
# print(theRobot_bt.address)
while (not theRobot_bt):
print("Robot not found")
theRobot_bt = await getRobot()
if (not Settings["cached"]):
print(f"New robot found. Must cache \
{theRobot_bt.address} manually in settings.py")
async with BleakClient(theRobot_bt.address, loop=loop, device=Settings["adapter"]) as client:
# if (await client.is_connected()):
# print("Robot connected!")
# srv = await client.get_services()
# print(srv)
await client.is_connected()
theRobot = Robot(client, bleak=True)
await client.start_notify(Descriptors["TX_CHAR_UUID"].value,
simpleHandler)
# await client.write_gatt_char(Descriptors["RX_CHAR_UUID"].value, msg)
async def myRobotTasks():
# PID loop happens offline on the robot. Print useful info.
global kpX, kiX, kdX, kpTh, kiTh, kdTh, odomd, rX, rTh
data = pack("<ffffff", kpX, kiX, kdX, kpTh, kiTh, kdTh)
length = 24 # Six four-byte numbers
await theRobot.sendCommand(Commands.SET_GAINS,length,data)
await theRobot.sendCommand(Commands.GET_ODOM)
rXLast = rX
rThLast = rTh
while isRunning: # keep updating stuff until the code stops
if not(rX==rXLast and rTh==rThLast): # if either one changes
data = pack("<ff", rX, rTh)
length = 8 # Two four-byte numbers
await theRobot.sendCommand(Commands.SET_VEL,length,data)
rXLast = rX # update "last" values
rTHLast = rTh
# and we should keep asking for odometry values
await theRobot.sendCommand(Commands.GET_ODOM)
await asyncio.sleep(0.05) # a whole 1/20 second
if order=="obsLoop":
await asyncio.gather(spin())
elif order=="move":
await asyncio.gather(drive())
else:
await asyncio.gather(odom())
# async for msg in checkMessages():
# print(f"BTDebug: {msg}")
Another issue I experienced was that when the Bluetooth connection died after the task completed, the odometry values reset. I handled this using a cache file called odometryCache.txt:
def readCache():
odomAbsolute = [0,0,0] # the robot's onboard odometry resets each time
# the Bluetooth connection dies. Save the last value and add each displacement to the last.
with open("odometryCache.txt", "r") as file:
line = file.readline() # should only be one line
j = 0
for i in range(3):
num = ""
while not (line[j]==","):
num = num + line[j]
j = j + 1
j = j + 1 # again, to get past the comma
odomAbsolute[i] = float(num)
return odomAbsolute
def writeCache(odomAbsolute):
with open("odometryCache.txt", "w") as file:
for i in range(3):
file.write(str(odomAbsolute[i])+",")
def resetCache():
writeCache((0,0,0))
The other two tasks, moving the robot and getting odometry pose, were accomplished using simple functions. Note the use of the cache. (observationLoop() did not use the cache since the robot stops in nearly the same place it started.)
def move(linSpeed, angSpeed, thisLong):
# Drive a certain distance with a certain curvature, and then stop.
global rX, rTh, howLong
rX = linSpeed
rTh = angSpeed
howLong = thisLong
odomAbsolute = readCache() # the robot's onboard odometry resets each time
# the Bluetooth connection dies. Save the last value and add each displacement to the last.
x = odomAbsolute[0]
y = odomAbsolute[1]
th = odomAbsolute[2]
loop = asyncio.get_event_loop()
loop.run_until_complete(robotRun(loop, "move")) # and run the tasks.
x = x + odomd[0]*cos(radians(th)) - odomd[1]*sin(radians(th))
y = y + odomd[0]*sin(radians(th)) + odomd[1]*cos(radians(th))
th = th + odomd[2]
writeCache([x,y,th])
return (x,y,th)
def returnPose():
odomAbsolute = readCache() # the robot's onboard odometry resets each time
# the Bluetooth connection dies. Save the last value and add each displacement to the last.
x = odomAbsolute[0]
y = odomAbsolute[1]
th = odomAbsolute[2]
loop = asyncio.get_event_loop()
loop.run_until_complete(robotRun(loop, "pullOdom")) # and run the tasks.
x = x + odomd[0]*cos(radians(th)) - odomd[1]*sin(radians(th))
y = y + odomd[0]*sin(radians(th)) + odomd[1]*cos(radians(th))
th = th + odomd[2]
writeCache([x,y,th])
return (x,y,th)
The implementation of the Bayes filter functions was trivial given the functions I wrote to do the exact things: move_robot() called commander.move() and get_pose() called commander.returnPose(). The only significant change I made was to make set_vel() do nothing since move_robot() returned the odometry values and handled all the background work. I did this because of the Bluetooth connection loss issue – the odometry values reset after each movement.
def move_robot(linSpeed, angSpeed, t):
'''Inputs: linSpeed (float): linear velocity target; 0 for point turn
angSpeed (float): angular velocity target; 0 for straight line
t (float): time to move at this speed
Outputs: curr_odom (float tuple): x, y, and theta after moving
prev_odom (float tuple): x, y, and theta before moving
'''
prev_odom = robot.get_pose()
# Code to move your robot goes here
curr_odom = commander.move(linSpeed, angSpeed, t)
# the move function both moves the robot and outputs the pose
#curr_odom = robot.get_pose()
return curr_odom, prev_odom
After Fixes
The low-pass filter did not help much with odometry error, but I was able to code in sanity checks for velocity: it may not be greater than the robot’s max speed, and it should not be nonzero before the robot starts moving. These reduced the error to about 1/20 what it was before (though the errors are still larger than the robot’s actual movement!)
artemis@artemis-VirtualBox:~/Shared/ECE4960/Lab9$ ./realRobot.py
Using python version: 3.6.9 (default, Oct 8 2020, 12:12:24)
[GCC 8.4.0]
Initializing Node
Initializing Real Robot
Initializing beliefs with a Uniform Distribution
Uniform Belief with each cell value: 0.00017806267806267807
| Precaching Views...
| Precaching Time: 27.30132031440735
Initializing beliefs with a Uniform Distribution
Uniform Belief with each cell value: 0.00017806267806267807
Update Step
| Update Time: 0.018919944763183594
---------- UPDATE STATS -----------
GT index : (-61, -443, 13)
Bel index : (8, 1, 16) with prob = 0.9999999
Bel_bar prob at index = 0.00017806267806267807
GT : (-13.514, -91.216, -279.550)
Belief : (1.300, 0.000, 150.000)
POS ERROR : (-14.814, -91.216, -429.550)
---------- UPDATE STATS -----------
Prediction Step
Uniform Belief with each cell value: 2.0030814916145253e-91
| Prediction Time: 0.2954094409942627
---------- PREDICTION STATS -----------
GT index : (436, -604, 17)
Prior Bel index : (11, 21, 4) with prob = 0.1415282
POS ERROR : (84.241, -127.541, -467.050)
Service call failed: service [/plot_prob_dist] responded with an error: b'error processing request: cannot reshape array of size 312 into shape (20,20)'
---------- PREDICTION STATS -----------
Update Step
| Update Time: 0.005780935287475586
---------- UPDATE STATS -----------
GT index : (599, -704, 17)
Bel index : (1, 12, 9) with prob = 1.0
Bel_bar prob at index = 3.2651845573609325e-21
GT : (118.677, -143.545, -917.618)
Belief : (-0.100, 2.200, 10.000)
POS ERROR : (118.777, -145.745, -927.618)
---------- UPDATE STATS -----------
Now, the probabilities were a bit more sensible (though still very small). For the second point, since the battery was too low to spin the robot at 30°/sec, I manually rotated the robot in place and got much better Bayes filter results: not only did the robot determine which corner it was in, but its location exactly corresponded to the real location. However, the plotter is still expecting a 20x20 array, as the Service call failed message above shows.
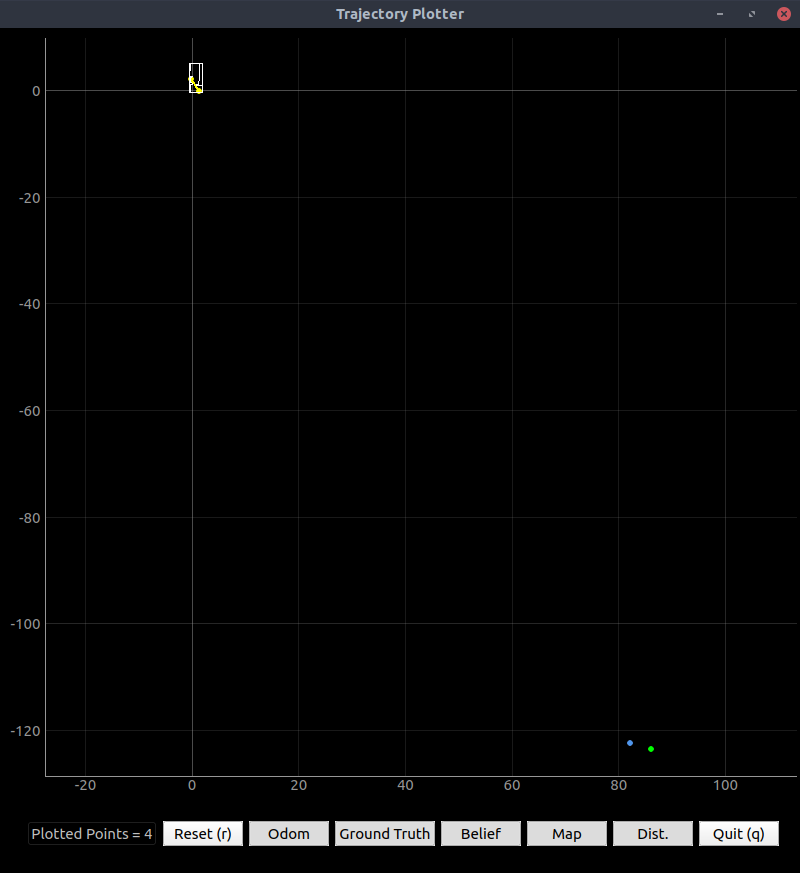
Figure 3. The odometry error is so much better that you can now see the map on the plot!
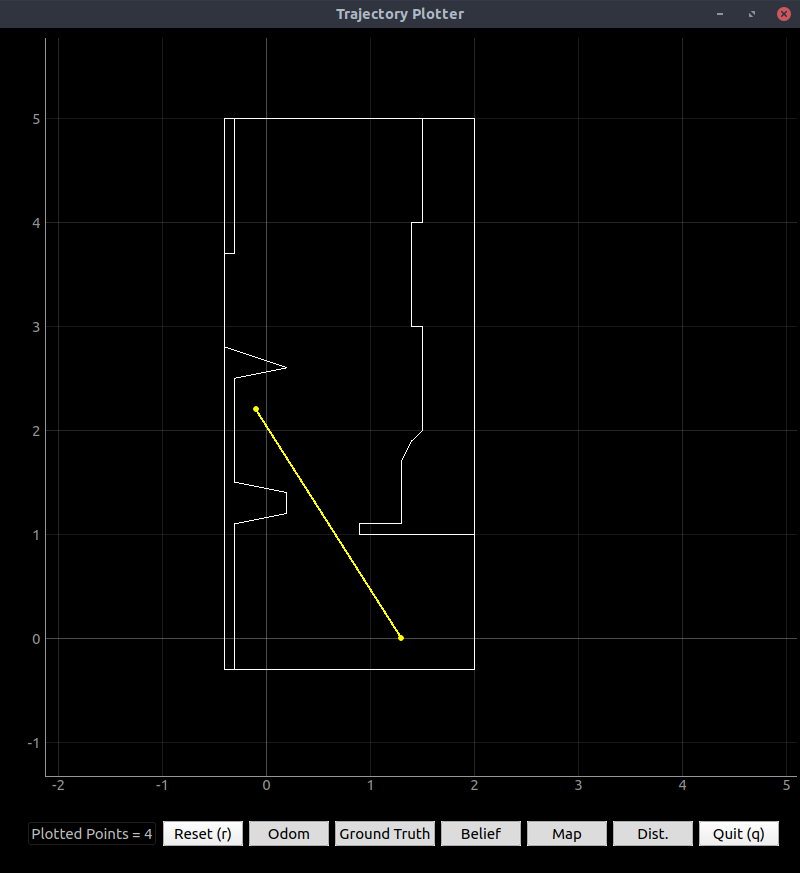
Figure 4. The robot was wrong the first time, but the second time, when I spun it perfectly in place, it was right!
To see the rest of my code and test scripts, see the GitHub folder.
Update (12-01-2020)
I added the line print("Current GT : ", current_gt) in the print_update_stats() function in robot_interface.py. Below are the results, with hard-coded ground-truth measurements, after a few runs:
Using python version: 3.6.9 (default, Oct 8 2020, 12:12:24)
[GCC 8.4.0]
Initializing Node
Initializing Real Robot
Initializing beliefs with a Uniform Distribution
Uniform Belief with each cell value: 0.00017806267806267807
| Precaching Views...
| Precaching Time: 28.38701319694519
Initializing beliefs with a Uniform Distribution
Uniform Belief with each cell value: 0.00017806267806267807
Update Step
| Update Time: 0.004635810852050781
---------- UPDATE STATS -----------
GT index : (6, 13, 8)
Current GT : (0.0, 0.0, 343.1861877441406)
Bel index : (8, 5, 0) with prob = 0.9971769
Bel_bar prob at index = 0.00017806267806267807
GT : (0.000, 0.000, 343.186)
Belief : (1.300, 0.800, -170.000)
POS ERROR : (-1.300, -0.800, 513.186)
---------- UPDATE STATS -----------
Prediction Step
Uniform Belief with each cell value: 6.63865859040986e-91
| Prediction Time: 0.8199536800384521
---------- PREDICTION STATS -----------
Traceback (most recent call last):
File "/home/artemis/.local/lib/python3.6/site-packages/bleak/backends/bluezdbus/client.py", line 153, in connect
).asFuture(self.loop)
txdbus.error.RemoteError: org.bluez.Error.Failed: Software caused connection abort
During handling of the above exception, another exception occurred:
Traceback (most recent call last):
File "./realRobot.py", line 202, in <module>
step_bayes_filter(currOdom, prevOdom)
File "./realRobot.py", line 167, in step_bayes_filter
loc.print_prediction_stats(plot_data=True)
File "/home/artemis/Shared/ECE4960/Lab9/robot_interface.py", line 454, in print_prediction_stats
current_gt = self.robot.get_gt_pose()
File "./realRobot.py", line 118, in get_gt_pose
return self.get_pose()
File "./realRobot.py", line 51, in get_pose
return commander.returnPose()
File "/home/artemis/Shared/ECE4960/Lab9/commander.py", line 329, in returnPose
loop.run_until_complete(robotRun(loop, "pullOdom")) # and run the tasks.
File "/usr/lib/python3.6/asyncio/base_events.py", line 484, in run_until_complete
return future.result()
File "/home/artemis/Shared/ECE4960/Lab9/commander.py", line 206, in robotRun
async with BleakClient(theRobot_bt.address, loop=loop, device=Settings["adapter"]) as client:
File "/home/artemis/.local/lib/python3.6/site-packages/bleak/backends/client.py", line 49, in __aenter__
await self.connect()
File "/home/artemis/.local/lib/python3.6/site-packages/bleak/backends/bluezdbus/client.py", line 164, in connect
raise BleakError(str(e))
bleak.exc.BleakError: org.bluez.Error.Failed: Software caused connection abort
Using python version: 3.6.9 (default, Oct 8 2020, 12:12:24)
[GCC 8.4.0]
Initializing Node
Initializing Real Robot
Initializing beliefs with a Uniform Distribution
Uniform Belief with each cell value: 0.00017806267806267807
| Precaching Views...
| Precaching Time: 28.03499174118042
Initializing beliefs with a Uniform Distribution
Uniform Belief with each cell value: 0.00017806267806267807
Update Step
| Update Time: 0.033971548080444336
---------- UPDATE STATS -----------
GT index : (6, 13, 8)
Current GT : (0.0, 0.0, 341.3060607910156)
Bel index : (1, 3, 8) with prob = 0.9999672
Bel_bar prob at index = 0.00017806267806267807
GT : (0.000, 0.000, 341.306)
Belief : (-0.100, 0.400, -10.000)
POS ERROR : (0.100, -0.400, 351.306)
---------- UPDATE STATS -----------
Prediction Step
Uniform Belief with each cell value: 9.322959283233761e-179
| Prediction Time: 0.29364705085754395
---------- PREDICTION STATS -----------
GT index : (-53, 71, 6)
Prior Bel index : (0, 25, 4) with prob = 0.5100627
POS ERROR : (-11.648, 6.894, 761.684)
Service call failed: service [/plot_prob_dist] responded with an error: b'error processing request: cannot reshape array of size 312 into shape (20,20)'
---------- PREDICTION STATS -----------
Update Step
| Update Time: 0.00471186637878418
---------- UPDATE STATS -----------
GT index : (-53, 71, 6)
Current GT : (-11.948388872960393, 11.69437851597061, 1030.6938786506653)
Bel index : (9, 4, 17) with prob = 0.6761967
Bel_bar prob at index = 3.4085286624677227e-49
GT : (-11.948, 11.694, 1030.694)
Belief : (1.500, 0.600, 170.000)
POS ERROR : (-13.448, 11.094, 860.694)
---------- UPDATE STATS -----------
Using python version: 3.6.9 (default, Oct 8 2020, 12:12:24)
[GCC 8.4.0]
Initializing Node
Initializing Real Robot
Initializing beliefs with a Uniform Distribution
Uniform Belief with each cell value: 0.00017806267806267807
| Precaching Views...
| Precaching Time: 27.305506944656372
Initializing beliefs with a Uniform Distribution
Uniform Belief with each cell value: 0.00017806267806267807
Update Step
| Update Time: 0.017717599868774414
---------- UPDATE STATS -----------
GT index : (6, 13, 8)
Current GT : (0.0, 0.0, 359.0617980957031)
Bel index : (6, 3, 13) with prob = 0.9999828
Bel_bar prob at index = 0.00017806267806267807
GT : (0.000, 0.000, 359.062)
Belief : (0.900, 0.400, 90.000)
POS ERROR : (-0.900, -0.400, 269.062)
---------- UPDATE STATS -----------
Prediction Step
Uniform Belief with each cell value: 7.242846000314905e-129
| Prediction Time: 0.30080437660217285
---------- PREDICTION STATS -----------
GT index : (-119, 13, 9)
Prior Bel index : (0, 25, 5) with prob = 0.7315834
POS ERROR : (-24.856, -4.647, 792.844)
Service call failed: service [/plot_prob_dist] responded with an error: b'error processing request: cannot reshape array of size 312 into shape (20,20)'
---------- PREDICTION STATS -----------
Update Step
| Update Time: 0.0045473575592041016
---------- UPDATE STATS -----------
GT index : (-119, 13, 9)
Current GT : (-25.155843523381773, 0.15341208552462435, 1088.1767808198929)
Bel index : (9, 20, 7) with prob = 0.9999696
Bel_bar prob at index = 2.2485678048850943e-33
GT : (-25.156, 0.153, 1088.177)
Belief : (1.500, 3.800, -30.000)
POS ERROR : (-26.656, -3.647, 1118.177)
---------- UPDATE STATS -----------
In each of these cases, the robot’s belief was close to the real value in position (though sometimes not in angle.) The first two times, it began near (0,0) and drove to about (1.5,0), facing in the +x direction. The third time, it began near (0.5,3) and drove to about (0.3,4.5) facing in the +y direction.
The Service call failed error messages occur because I had not yet rewritten the plotter code to accept different-sized arrays.
Lab 10
Materials
Used the same materials as in lab 6 and following.
Procedure
- Downloaded the base code from here and ran
setup.sh. - Compared various options for path planning and navigation.
- Rewrote robot interface code to support additional operations and to allow continuous Bluetooth control and data acquisition.
- Ran the
lab10_generate_query.ipynbJupyter notebook and wrote code to generate a grid based on my map. - Wrote a path planner (depth-first, then A*) in Python and used it to generate paths from arbitrary starting points to arbitrary goals.
- Instantiated the
searchclass. - Generated start and end points and fed these to the path planner.
- Ran the path planner.
- Mapped the results back to the world frame.
- Instantiated the
- Wrote code to make the robot step through the planned path, assuming it started at the expected point.
- TODO - OPTIONAL: wrote code to localize the robot, use that position as a starting point, and then plan a path to an arbitrary goal and go there.
Results and Conclusions
Decisions and Justification
After some brainstorming, chose to use the Bayes filter and global path planning for the following reasons:
- Wall-following is just too slow. Global path planning allows an efficient solution.
- I only have one ToF sensor.
- The proximity sensor responds differently to different types of surfaces.
- Using the proximity sensor for wall-following or for obstacle avoidance could be problematic.
- I want to learn and understand global path planning.
Chose to write my own path planner because:
- Path planner libraries (such as ROS Global Planner) required learning a whole new interface.
- This could be more painful that coding one myself.
- ROS is already old (ROS2 supersedes it) and similarly, knowledge gained by learning other libraries could be useless later.
- I want to better understand global path planning.
Due to the lack of good straight-line readings, chose to use the ToF to measure distance traveled when moving in a straight line. Since the map is almost perfectly rectilinear, this could work well as long as the robot only makes right-angle turns. A right-angle-only navigation system has the additional advantage of speed: since the angular configuration space has only four possible positions (rather than 18) the speed increases by a factor of 9/2 = 4.5x. Indeed, the finish path planner consistently found an optimal (or near-optimal) path in less than a tenth of a second.
New Interface Code
Followed Alex Coy’s videos on Bluetooth and localization in Jupyter notebooks. Experienced issues with my setup due to odd implementation details; found that the exact names of classes mattered. My implementation looks very much like his:
theRobotHolder = robotHolder()
async def robotRun(loop):
# simpleHandler() goes here
# code...
async def stayConnected():
while theRobot.isRunning:
if(theRobot.availMessage()): # keep checking for BT messages
print(f"BTDebug: {theRobot.getMessage()}")
await asyncio.sleep(0.1)
# You can put a UUID (MacOS) or MAC address (Windows and Linux)
# in Settings["Cached"].
if (not Settings["cached"]):
theRobot_bt = await getRobot()
else:
theRobot_bt = type("", (), {})()
theRobot_bt.address = Settings["cached"]
# print(theRobot_bt.address)
while (not theRobot_bt):
print("Robot not found")
theRobot_bt = await getRobot()
if (not Settings["cached"]):
print(f"New robot found. Must cache \
{theRobot_bt.address} manually in settings.py")
async with BleakClient(theRobot_bt.address, loop=loop, device=Settings["adapter"]) as client:
await client.is_connected()
theRobot = Robot(client) # instantiate Robot class (always uses Bleak)
theRobotHolder.setRobot(theRobot) # fit Robot object into robotHolder
# Initialize class variables: sensor reading and motor value tuples
theRobot.odomd = (0,0,0,0) # x position, y position, yaw angle, ToF (floats)
theRobot.veld = (0,0,0,0) # x vel., y vel., angular vel., ToF (floats)
theRobot.isRunning = True # keeps connection alive while it's true
await client.start_notify(Descriptors["TX_CHAR_UUID"].value,
simpleHandler)
await asyncio.gather(stayConnected())
This enabled me to run await theRobot.function() for arbitrary class functions in the Jupyter notebook:
from commander import *
loop = asyncio.get_event_loop()
try:
loop.run_until_complete(robotRun(loop))
except RuntimeError:
asyncio.gather(robotRun(loop))
theRobot = robotHolder.getRobot()
I then needed to change most of my functions to be asynchronous. The main change I made was to perform_observation_loop():
async def perform_observation_loop(self, observationCount=18, rotVel=30):
""" (Instructions here.)
Args:
observation_count (integer): Number of observations to record
rot_vel (integer): Rotation speed (in degrees/s)
Returns:
obs_range_data (ndarray): 1D array of 'float' type containing observation range data
"""
await theRobot.getOdom()
odomd = theRobot.odomd
while odomd[2] == 0: # wait for values to come
await asyncio.sleep(0.1)
#print("Waiting for angle...") # for debugging
angStart = odomd[2]
#print(angStart) # for debugging
odomList = [] # array of odometry readings and angles
rTh = 30 # spin at 30°/second counterclockwise (CCW = +, CW = -)
await theRobot.setVel(rTh,0)
ang = 0
while ang < 360: # Run until the robot has made a full turn
ang = abs(odomd[2] - angStart) # update relative turn amount (strictly positive)
odomList.append((ang,odomd[3])) # save the RELATIVE angle and range to the list
#print(ang) # for debugging
await asyncio.sleep(0.02)
await theRobot.setVel(0,0) # Stop the robot
length = len(odomList) # number of entries in list
out = [] # output list
for i in range(length): # loop through the entire list after spinning
currAngle = round(odomList[i][0]) # current angle (integer)
if (currAngle%20 == 0) and (currAngle/20 == len(out)-1):
# if the angle is a multiple of 20° AND we haven't already checked it
#out.append((currAngle,odomList[i])) # for debugging
out.append(odomList[i][1]/1000) # save the angle and the range IN M
elif currAngle/20 > (len(out)): # if we skipped one
j = i
angleJ = round(odomList[j][0])
while angleJ < (len(out)+1):
j = j - 1 # average two closest angles
angleJ = abs(round(odomList[j][0]))
r = 0.5*odomList[i][1]+0.5*odomList[j][1]
th = 0.5*currAngle + 0.5*angleJ
#out.append((th,r)) # debugging
out.append(r/1000) # /1000 since measurements are in mm and we
if len(out)==0:
print("Warning: got zero observation readings.")
else:
out.insert(0, out.pop(-1))
return np.array(out)
I had to make some changes to the robot’s Arduino code as well. Since I wasn’t able to achieve accurate odometry readings, closed-loop linear position control was out of the question. I changed the code to use open-loop control for forward/back positioning and PID control for angular positioning:
// Handle PID command
if(pid){ // As long as we're running the controller,
// pid code same as before...
output = kp*e+ki*inte+kd*(de/dt); // calculate output
if (r[1] !=0){ // If a nonzero linear velocity is requested,
for(int i=0; i<2; i++){ // combine outputs from linear and angular PID controllers
int sign = pow(-1, (float) i+FLIPPED); // -1^i so 1 for i=0; -1 for i=1
// I couldn't make PID control with the accelerometer work, so I'm using open-loop.
// Proportional gain is the multiplier (H) for the reference input.
power[i] = sign*(127*r[1] + offsetFB/2) + 127 + offsetLR/2 + output;
Serial.printf("\nSetting motor %d to %d\n",i,power[i]);
}
if (v > maxSpeed) // Sanity check on velocity reading - avoid quadratic error integration
v = maxSpeed;
else if (v < -maxSpeed)
v = -maxSpeed;
else
v = v + aCX*dt; // If robot is moving (with PID), integrate to get velocity
}
else{ // spinning in place; ignore linear velocity
// but still use open-loop constants to attempt to spin in place
power[right] = output + 127 - offsetFB/2; // forward on both sides, and the bot spins CCW
power[left] = (float) calib*(output + 127) + offsetLR + offsetFB/2;
v = 0; // linear velocity assumed zero
}
for(int i=0; i<2; i++){ // update motor powers
if (power[i] > 255)
power[i] = 255;
else if(power[i] < 0)
power[i] = 0;
else
power[i] = power[i];
Serial.printf("\nSetting motor %d to %d\n",i,power[i]);
scmd.writeRegister(SCMD_MA_DRIVE+i,power[i]); // the driver accepts a value 0-255
}
}
else{ // controller isn't running; motors are stopped
// and reset odometry velocity reading
v = 0;
}
I was able to achieve consistent near-zero turn radii by coating the rear wheels of the robot with Scotch tape (which is more slippery than other kinds of tape.)
Path planning
Generated a grid from a map automatically using the following code:
# Generate a grid of the right size; all unoccupied cells are zero...
grid = np.zeros((cellsY+1, cellsX), dtype=np.uint8) # planner needs 8-bit integers
# (maybe it's my choice of bounding box, but the y dimension gets chopped off, so it needs 1 more.)
# ... and the the occupied cells are 1
# (negative numbers tend to mess this up. So, the code shifts the coordinates until they are positive.)
minX = min(start_points[:,0]) # and note that the two arrays contain all the same points,
minY = min(start_points[:,1]) # just in different orders
for i in range(np.shape(start_points)[0]):
xStart = start_points[i,0] - minX
yStart = start_points[i,1] - minY
xEnd = end_points[i,0] - minX
yEnd = end_points[i,1] - minY
# interpolate with half-cell resolution so no cells are skipped
numInterpPoints = round(max(abs((xEnd-xStart)/0.1), abs((yEnd-yStart)/0.1)))
#print(numInterpPoints)
if (numInterpPoints > 0): # sometimes there will be a duplicate point
stepX = (xEnd-xStart)/numInterpPoints
stepY = (yEnd-yStart)/numInterpPoints
#print("step: {},{}".format(stepX, stepY))
for s in range(numInterpPoints):
x = s*stepX + xStart
y = s*stepY + yStart
#print("{},{}".format(x,y))
grid[int(y/0.2),int(x/0.2)] = 1
else:
grid[int(yStart/0.2),int(xStart/0.2)] = 1
grid = np.flipud(grid) # by default, rows are numbered top-to-bottom
Wrote the following code (after many tries) to perform an A* search:
class search:
# init function
# neighbors function
# frontier function which calls neighbors and cost functions
def astar(self, start, goal):
# Depth-first search (with cost)
# Inputs: start: 1-D numpy array of 2 or 3 coordinates
# and goal: 1-D numpy array of 2 or 3 coordinates
# Output: solution: list of nodes leading to goal (start to end)
if len(start) is 2: # if the input is just [x,y] or (x,y)
start = list(start) # make sure it's mutable
start.append(0) # add an angle coordinate
start = tuple(start) # and make it immutable to avoid problems
if len(goal) is 2: # if the input is just [x,y] or (x,y)
goal = list(goal) # make sure it's mutable
goal.append(0) # add an angle coordinate
goal = tuple(goal) # and make it immutable to avoid problems
here = [start] # We are at the starting point.
startTime = time.time()
#print("Starting at ({},{},{})\n".format(*here[0]))
next = self.frontier(here) # Take the first look around.
# next is the queue of nodes to check next.
#print("Trying these cells first: " + str(next) + "\n")
bestPriority = 1000
for i in next: # i is a set of coordinates in list next
if i[:] == goal[:]: # we're done!
print("Found a solution after {0:1.3f} seconds\n".format(time.time()-startTime))
self.solution = self.genPath(start,goal)
priority = 2*self.heuristic(i,goal) \
+ self.cost[i[0],i[1],i[2]]
if (priority < bestPriority): # better than the best so far!
bestPriority = priority # this is the new best
next.insert(0,next.pop(next.index(i))) # move it to the front
#print("After sorting: " + str(next) + "\n")
#while not not(next) and self.solution is None:
while not not(next):
# keep searching until soln found OR the frontier is empty
#print("Trying these cells next: " + str(here) + "\n")
# Loosely sort in order of best heuristic and cost.
# In the same loop, mark "came from" cells.
bestPriority = 1000
for i in next: # i is a set of coordinates in list next
if i[:] == goal[:]: # we're done!
print("Found a solution after {0:1.3f} seconds\n".format(time.time()-startTime))
solution = self.genPath(start,goal)
solution.reverse()
return solution
priority = 2*self.heuristic(i,goal) \
+ self.cost[i[0],i[1],i[2]]
if (priority < bestPriority): # better than the best so far!
bestPriority = priority # this is the new best
next.insert(0,next.pop(next.index(i))) # move it to the front
#print("After sorting: " + str(next) + "\n")
here = next
next = self.frontier(here) # generate next queue
# cost function
# heuristic function
Also wrote a DFS (Depth-First Search) algorithm in the process. Implemented the functions self.frontier, self.heuristic, and others. See GraphSearch.py for the full code.
Found the Red Blob Games A* page (linked in the lecture nodes) very useful.
searcher = search(grid)
Ran the path planner and plotted the results using this code:
# Generate 10 different start and goal cells based on the occupancy grid encoded in the **grid** variable.
# Each plot showcases the obstacles in white, while the start and goals cells are depicted in red and green, respectively.
for i in range(0,1):
# Generate a start and goal pair
x = pq.generate(plot=True)
solution = searcher.astar(x[0], x[1])
print("-----------------")
if solution is not None:
for s in solution:
# x's are columns and y's are rows, backwards but right-side-up
xWorld = list(loc.mapper.from_map(*s)[:2])
xWorld.reverse()
xWorld[0] = minX + xWorld[0]
xWorld[1] = maxY + minY - xWorld[1]
loc.plotter.plot_point(*xWorld,ODOM)
xWorld = [] # initialize world coordinate array
for k in range(2): # get x,y coords. of start and end points
xWorld.append(list(loc.mapper.from_map(*x[k],0))[:2])
xWorld[k].reverse()
xWorld[k][0] = minX + xWorld[k][0]
xWorld[k][1] = maxY + minY - xWorld[k][1]
loc.plotter.plot_point(*xWorld[0],BEL)
loc.plotter.plot_point(*xWorld[1],GT)
With depth-first search algorithms (searcher.dfs() instead of searcher.astar) the results were wonky. Worse, I didn’t implement the frontier “been-here-before” correctly, so it retraced its steps. Lastly, the DFS used recursion, and each branch often contained a solution, so the solutions plotted on top of each other.
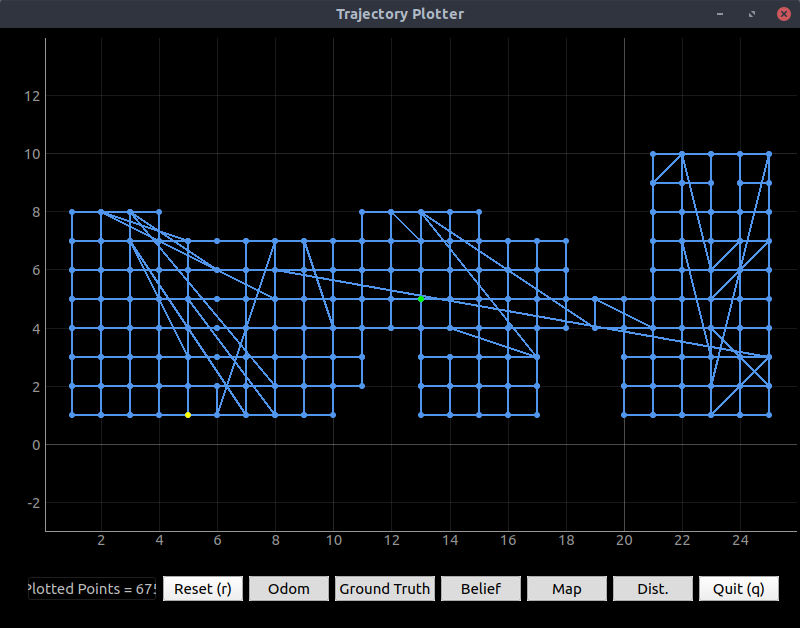
Figure 1. Bad search algorithm. Yellow dot is starting point; green is ending point; and blue is path.
However, after I understood A* and used loops instead of recursion, the planner completed with near-optimal solutions.
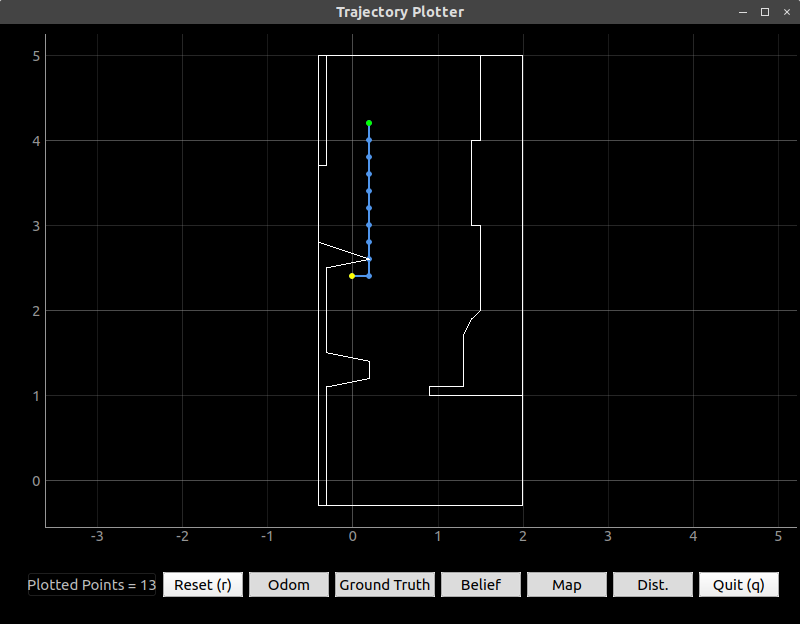
Figure 2. Good search algorithm (A*). Yellow dot is starting point; green is ending point; and blue is path.
It was predictable, even for more complex paths:
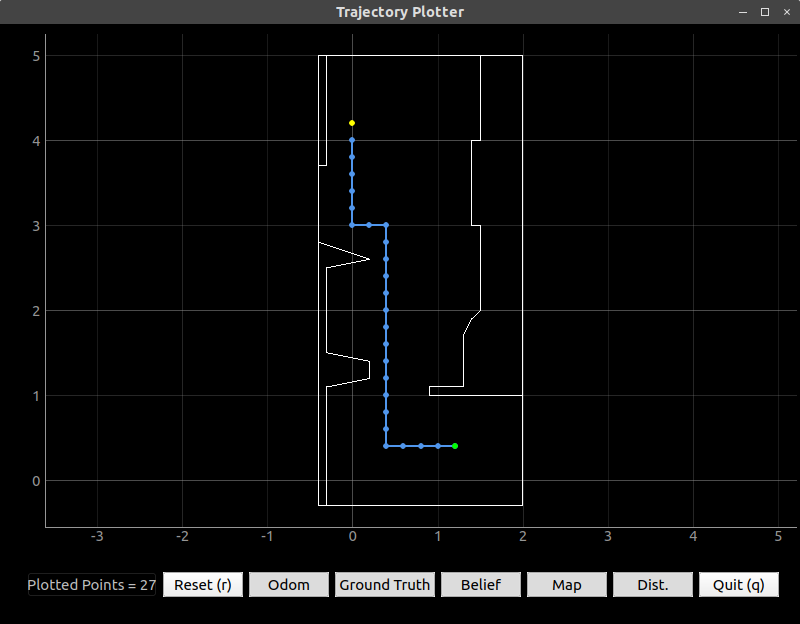
Figure 3. A* algorithm completes a more complex path. Yellow dot is starting point; green is ending point; and blue is path.
And it was consistently fast: the average solution time is about 0.05 seconds and the highest so far is 0.085 seconds.
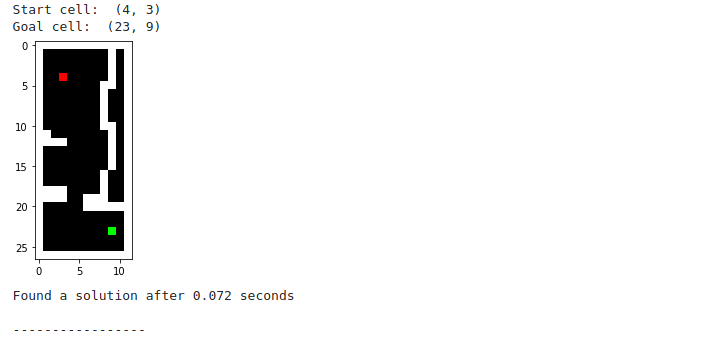
Figure 4. A relatively long solution time.
Below is the working code for generating start points, finish points, and paths using the path planner:
# Generate a grid of the right size; all unoccupied cells are zero...
grid = np.zeros((cellsY+1, cellsX), dtype=np.uint8) # planner needs 8-bit integers
# (maybe it's my choice of bounding box, but the y dimension gets chopped off, so it needs 1 more.)
# ... and the the occupied cells are 1
# (negative numbers tend to mess this up. So, the code shifts the coordinates until they are positive.)
minX = min(start_points[:,0]) # and note that the two arrays contain all the same points,
minY = min(start_points[:,1]) # just in different orders
for i in range(np.shape(start_points)[0]):
xStart = start_points[i,0] - minX
yStart = start_points[i,1] - minY
xEnd = end_points[i,0] - minX
yEnd = end_points[i,1] - minY
# interpolate with half-cell resolution so no cells are skipped
numInterpPoints = round(max(abs((xEnd-xStart)/0.1), abs((yEnd-yStart)/0.1)))
#print(numInterpPoints)
if (numInterpPoints > 0): # sometimes there will be a duplicate point
stepX = (xEnd-xStart)/numInterpPoints
stepY = (yEnd-yStart)/numInterpPoints
#print("step: {},{}".format(stepX, stepY))
for s in range(numInterpPoints):
x = s*stepX + xStart
y = s*stepY + yStart
#print("{},{}".format(x,y))
grid[int(y/0.2),int(x/0.2)] = 1
else:
grid[int(yStart/0.2),int(xStart/0.2)] = 1
grid = np.flipud(grid) # by default, rows are numbered top-to-bottom
# Instantiate the class PlannerQuery
pq = PlannerQuery(grid)
searcher = search(grid)
solution = []
# Generate 10 different start and goal cells based on the occupancy grid encoded in the **grid** variable.
# Each plot showcases the obstacles in white, while the start and goals cells are depicted in red and green, respectively.
numStartGoal = 1 # will be 10 eventually
for i in range(0,numStartGoal):
# Generate a goal cell **from robot's real start position**
x = pq.generate(plot=True)
# Below (not working yet): localize with new code, and use that position as x[0]
#init_bayes_filter()
#x = [get_max(loc.bel)[0][:2] ] # first two entries (x,y)
#x.append(pq.generateGoal(x[0],plot=True)) # x has the same format
solution.append(searcher.astar(x[0], x[1]))
print("-----------------")
After this code runs in a Jupyter cell, the results are passed to the next cell, where the robot is instructed to follow the path.
Making the Robot Follow the Path
Turning
The design of the path planner simplified driving to only ±90° turns and straight lines. Thus far, I had achieved approximate turns using PID velocity control and a while loop which stopped it when it reached its goal. I attempted to achieve better angular control using a proportional controller which fed velocity inputs to the existing PID (actually PI) velocity controller. The below code tests the angular positioning portion of the problem.
# angular test
speed = 30
turnAngle = 90
stopTime = 0.5
loopTime = 0.1
angThreshold = 2
await theRobot.getOdom()
await asyncio.sleep(5)
while theRobot.odomd[3] is 0:
await asyncio.sleep(loopTime)
startAngle = theRobot.odomd[2]
for i in range(2): # test more than once: original loop changed turnAngle at the end
error = turnAngle - (theRobot.odomd[2] - startAngle)
if turnAngle > 0:
# need to turn CCW
await theRobot.setVel(0,0) # stop first
await asyncio.sleep(stopTime)
while error > angThreshold: # run proportional control
error = turnAngle - (theRobot.odomd[2] - startAngle)
#print("Heading error is " + str(error)+"°")
#print("Angle is " + str(theRobot.odomd[2])+"°\n")
await theRobot.setVel(0,max(speed,3*error)) # with threshold
await asyncio.sleep(loopTime)
elif turnAngle < 0:
# need to turn CW
await theRobot.setVel(0,0)
await asyncio.sleep(stopTime)
while -error > angThreshold: # run proportional control
error = turnAngle - (theRobot.odomd[2] - startAngle)
#print("Heading error is " + str(error)+"°")
#print("Angle is " + str(theRobot.odomd[2])+"°\n")
await theRobot.setVel(0,min(-speed,3*error)) # with threshold
await asyncio.sleep(loopTime)
await robot.set_vel(0,0)
await asyncio.sleep(stopTime)
Driving Straight
This code segment tested the forward/back positioning portion of the problem.
# Linear test: crude PD controller
expectedView = 0.8 # meters from wall
drivingForward = True
linearThreshold = 0.02
minVel = -0.5
kp = 1
kd = 2
lastError = 0
await theRobot.getOdom()
await asyncio.sleep(5)
currentView = theRobot.odomd[3]/1000 # ToF reading (m)
print("When I get there, I will see " + str(expectedView)+" m\n")
print("Now, I see " + str(currentView)+" m\n")
error = currentView - expectedView
if currentView < expectedView: # need to drive backwards
if drivingForward: # need to reverse direction
await theRobot.setVel(0,0) # stop first
await asyncio.sleep(stopTime)
sign = -1
drivingForward = False
else: # currentView >= expectedView; need to drive forwards
if not drivingForward: # need to reverse direction
await theRobot.setVel(0,0) # stop first
await asyncio.sleep(stopTime)
sign = 1
drivingForward = True
while sign*error > linearThreshold:
#print("Position error is " + str(error)+" m\n")
output = kp*error + kd*(error-lastError)
vel = sign*max(min(sign*output,1),minVel)
# sign correction, upper & lower threshold
#vel = max(2*error-minVel, -1)
await theRobot.setVel(vel,0)
await asyncio.sleep(loopTime)
lastError = error
error = theRobot.odomd[3]/1000 - expectedView # update reading
await theRobot.setVel(0,0)
Driving forwards (drives crooked because closed-loop angle control is off in this video):
When I get there, I will see 0.8 m
Now, I see 1.852 m
Driving backwards:
When I get there, I will see 0.8 m
Now, I see 0.294 m
And it worked with small movements as well.
Below is the code for executing the planned path (assuming starting position is known, and starting angle is always 0°.)
# Angular parameters
angThreshold = 2 # allowed deviation in angular positioning
minRot = 30
gain = 10
# Linear parameters
expectedView = 0.8 # meters from wall
drivingForward = True # bit to remember which way we've been driving
linearThreshold = 0.1 # must be less than 10 cm off.
minVel = -0.5 # smallest allowed linear speed
kp = 1
kd = 1
lastError = 0
# General parameters
stopTime = 0.5 # time (s) to wait for the robot to come to a full stop
loopTime = 0.1 # time (s) to wait during while loops
await asyncio.sleep(6) # give Tim time to run and start recording
for i in range(0,numStartGoal):
if solution[i] is not None:
await theRobot.getOdom() # request odometry and ToF data
sLast = [*x[0],0] # initialize "last" position at starting point (0° heading)
while theRobot.odomd[3] is 0:
await asyncio.sleep(loopTime) # wait for ToF readings to show up
for s in solution[i]:
print("Step " + str(solution[i].index(s)) + ":\n")
print(s)
# THESE ARE INDICES and not world coordinates
pose = [s[1],s[0],round((9/2)*s[2]+9)] # 90° to 20° increments
if pose[2] > 18: # normalize the angle index
pose[2] = pose[2] - 18
elif pose[2] < 0:
pose[2] = pose[2] + 18
print("I'm about to go to pose " + str(pose))
expectedView = loc.mapper.get_views(*pose)[0] # view facing forward, m
#print("When I get there, I will see " + str(expectedView)+" m\n")
# use 90° increments so 0° doesn't turn into +/- 10°
turnAngle = 90*(s[2] - sLast[2])
if turnAngle > 180: # normalize the turn angle
turnAngle = turnAngle - 360
elif turnAngle < -180:
turnAngle = turnAngle + 360
print("I need to turn " + str(turnAngle)+"°\n")
startAngle = theRobot.odomd[2]
error = turnAngle - (theRobot.odomd[2] - startAngle)
if turnAngle > 0:
# need to turn CCW
await theRobot.setVel(0,0) # stop first
await asyncio.sleep(stopTime)
while error > angThreshold: # run proportional control
error = turnAngle - (theRobot.odomd[2] - startAngle)
#print("Heading error is " + str(error)+"°")
#print("Angle is " + str(theRobot.odomd[2])+"°\n")
await theRobot.setVel(0,max(speed,3*error)) # with threshold
await asyncio.sleep(loopTime)
await robot.set_vel(0,0)
await asyncio.sleep(stopTime)
elif turnAngle < 0:
# need to turn CW
await theRobot.setVel(0,0)
await asyncio.sleep(stopTime)
while -error > angThreshold: # run proportional control
error = turnAngle - (theRobot.odomd[2] - startAngle)
#print("Heading error is " + str(error)+"°")
#print("Angle is " + str(theRobot.odomd[2])+"°\n")
await theRobot.setVel(0,min(-speed,3*error)) # with threshold
await asyncio.sleep(loopTime)
await robot.set_vel(0,0)
await asyncio.sleep(stopTime)
else: # need to drive straight, not turn
currentView = theRobot.odomd[3]/1000 # ToF reading (m)
print("When I get there, I will see " + str(expectedView)+" m\n")
print("Now, I see " + str(currentView)+" m\n")
error = currentView - expectedView
if currentView < expectedView: # need to drive backwards
if drivingForward: # need to reverse direction
await theRobot.setVel(0,0) # stop first
await asyncio.sleep(stopTime)
sign = -1
drivingForward = False
else: # currentView >= expectedView; need to drive forwards
if not drivingForward: # need to reverse direction
await theRobot.setVel(0,0) # stop first
await asyncio.sleep(stopTime)
sign = 1
drivingForward = True
while sign*error > linearThreshold:
#print("Position error is " + str(error)+" m\n")
output = kp*error + kd*(error-lastError)
vel = sign*max(min(sign*output,1),minVel)
# sign correction, upper & lower threshold
#vel = max(2*error-minVel, -1)
await theRobot.setVel(vel,0)
await asyncio.sleep(loopTime)
lastError = error
error = theRobot.odomd[3]/1000 - expectedView # update reading
await theRobot.setVel(0,0)
sLast = s
# # x's are columns and y's are rows, backwards but right-side-up
# xWorld = list(loc.mapper.from_map(*s)[:2])
# xWorld.reverse()
# xWorld[0] = minX + xWorld[0]
# xWorld[1] = maxY + minY - xWorld[1]
# loc.plotter.plot_point(*xWorld,ODOM)
# xWorld = [] # initialize world coordinate array
# for k in range(2): # get x,y coords. of start and end points
# xWorld.append(list(loc.mapper.from_map(*x[k],0))[:2])
# xWorld[k].reverse()
# xWorld[k][0] = minX + xWorld[k][0]
# xWorld[k][1] = maxY + minY - xWorld[k][1]
# loc.plotter.plot_point(*xWorld[0],BEL)
# loc.plotter.plot_point(*xWorld[1],GT)
Hardware Issues
Experienced two main problems in this lab: (1) the small LiPo battery wire broke inside the connector, and (2) the wheels did not skid as desired. Responded as follows:
-
First, tried to power the robot via USB using a portable charger. This worked for a few seconds, and then the charger turned off due to the low current draw. Then, managed to solder the wire back into the connector with lots of extra solder, as shown below. This usually worked, though sometimes the wire had to be unplugged and plugged back in to make the robot power on.
-
Coated the two rear wheels with Scotch tape. Reasoned as follows:
- Need two wheels to control both speed and direction. Any more wheels, and some wheels must skid during turns.
- Want an absolute orientation during turns. Want to point-turn.
- Used “omni wheels” (such as those in holonomic drives) to make predictable point turns in other projects.
- Using two skidable wheels and two high-friction wheels tends to make a robot turn about a point somewhere between the two wheels (depending on relative speeds.)
- Turning about the front is optimal since the ToF sensor is at the front.
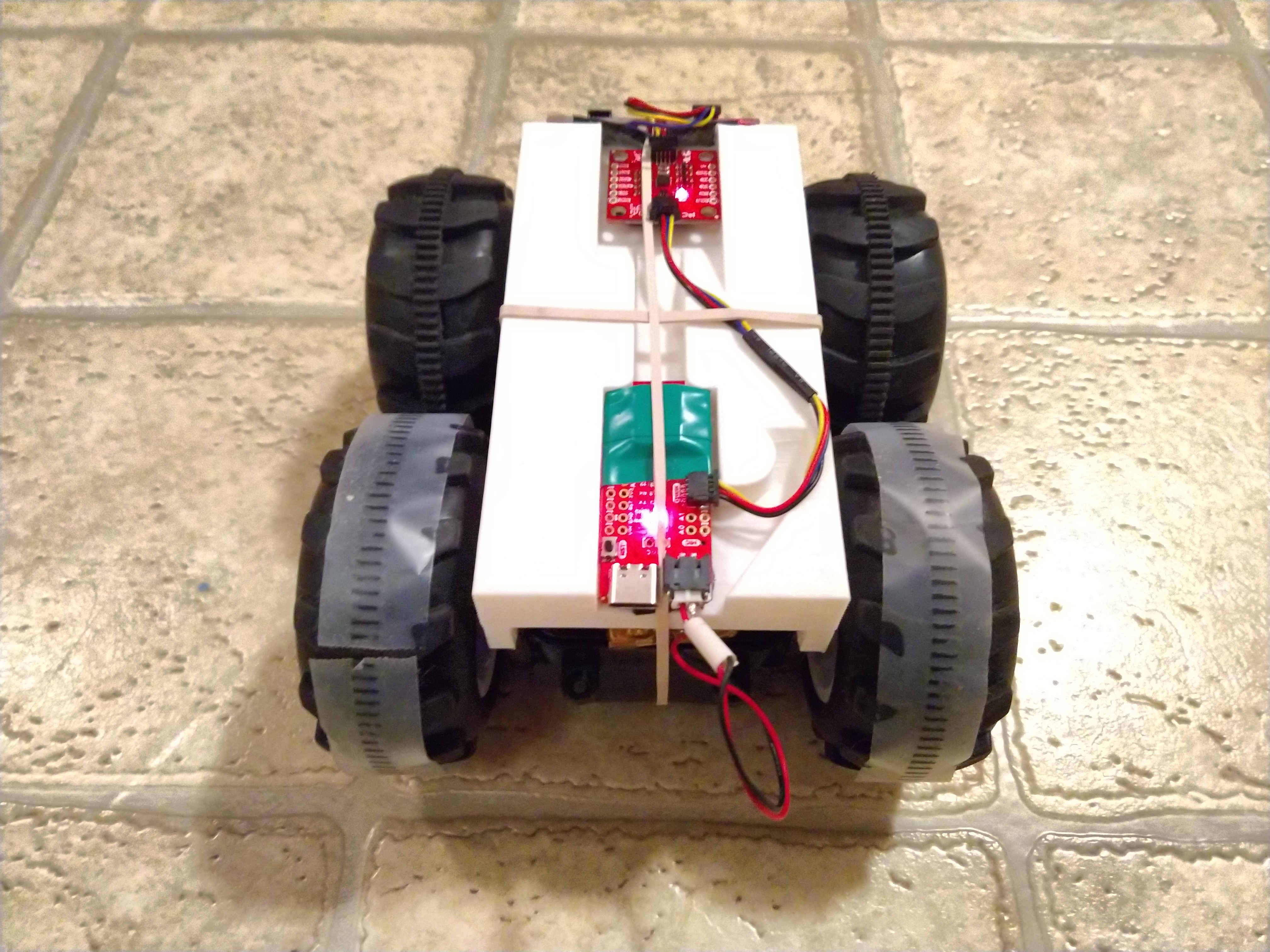
Succeeded in making the robot make nearly perfect point turns; it tends to turn about its right wheel, which is very close to the position of the ToF sensor.
The Most Fun Results
I hope you enjoy these highlights from the blooper reel.
These videos demonstrate the importance of controlling angle while driving straight.
I had trouble making it turn accurately, even with sufficient battery. When the gain was too small:
And, finally, the battery died.
Obviously there is more work to be done. Due to my finite time for other courses, I am leaving the following tasks undone:
- The angular control system still does not work.
- The answer does not lie in the magnetometer, as the magnetic fields vary significantly in a single room.
- The gyroscope could be better calibrated, but this is not the main issue.
- Even when the battery is good, the proportional control does not send a sufficient velocity command to make the robot spin; rather, it either undershoots and hangs or overshoots.
- I believe this is a bug, not a tuning issue, since I tried cranking up the gain and the same thing happened.
- A change is needed for the Bayes filter to work with the asynchronous
get_observation_data()function.- The Bayes filter itself works, since it worked in Lab 9.
- Again, I attempted to fix this, but a variable passed to the existing functions in
robot_interface.pyis not getting typed correctly, so it throws an error. I don’t think I am passing any outputs with valueNonebut apparently I am.
planner_querysometimes assigns a start point inside the counter.- I need to manually add ones to all the points inside the counter (can’t think of a programmatic way to do it.)
- This is a “won’t fix” since the goal is to pass the robot’s actual starting position into the planner.
- Add a dance, light flash, etc. when the robot reaches the goal!
See the rest of my code and results here on GitHub.
Lab 11b
This is the simulation version (version b) of this lab. Note that all the figures below are videos of the system response.
Materials Used
- Computer, running Python 3.6 or higher, with these additional libraries:
Setup
Downloaded the lab simulation code and read it for understanding.
System Parameters
Changed the parameters in pendulumParam.py to match those of the physical robot. Since I didn’t have a scale to measure mass, I consulted other groups’ data from Lab 3.
Results
Mass
My setup replaced the control board with the SCMD module and added a 3D-printed hood, whose mass I measured using Cura with no build plate adhesion. So, the masses of the robot parts are as follows:
| Part | Mass (g) |
|---|---|
| Car (no battery, cosmetic hood, control board) | 450-460 |
| Battery | 50-65 |
| Electronic components | 40 |
| 3D-printed hood (20% infill, minus brim) | 57 |
| Total | 597-623 |
| Total (used for simulation) | 610 |
Used a larger estimate for battery since my repair added solder, electrical tape, and extra wire. Used the low-end estimate for car since cosmetic hood & original control board were removed. Neglected very small additions such as wires
Effective Damping Constant
In Lab 3, I measured stopping time from maximum speed to make calculation of a damping constant b possible. I assumed first-order damping and neglected dynamic friction. This model breaks down at very low speeds since start-stop friction of the gears becomes significant, so below a certain threshold speed, the robot will stop in a very short time due to this friction. By feeling when the gears began this start-stop behavior, I moved the robot at this speed next to a ruler with a timer. The threshold speed is approximately 5 cm/s. Thus, the final speed in the damping equation is 0.05 m/s.
First-order damping equation:
First-order solution:
Equating the two stop times:
From Lab 3, the maximum speed v₀ was 3.5 m/s and the stop distance x-x₀ was 2-2.4 m. Then, the damping constant will range from 0.125 to 0.15.
This is unreasonable, since the resulting stopping time comes out to 17 seconds. Though I can’t find my mistake, I observed about 3-4 seconds stopping time (as did the few other students who recorded stopping time measurements.) Basing my estimate on more reasonable stop time of 3-4 seconds, the damping constant is nearly the same as that measured by the TA:
 = 0.647 to 0.864
Thus, I left the damping constant b at its original value. The animation with m=0.61 and b=0.78, does not appear reasonable, but mainly because of a lack of deadband in the drivetrain; this issue is analyzed later.
Maximum Motor Torque
Rather than analyzing the motor torque and the wheel radius independently, I choose to treat the robot as a block being pushed by a force whose magnitude is the motor torque ÷ the wheel radius.
Given that the maximum incline a robot with medium-drained battery can climb is 45°, finding the motor force becomes a simple statics problem:
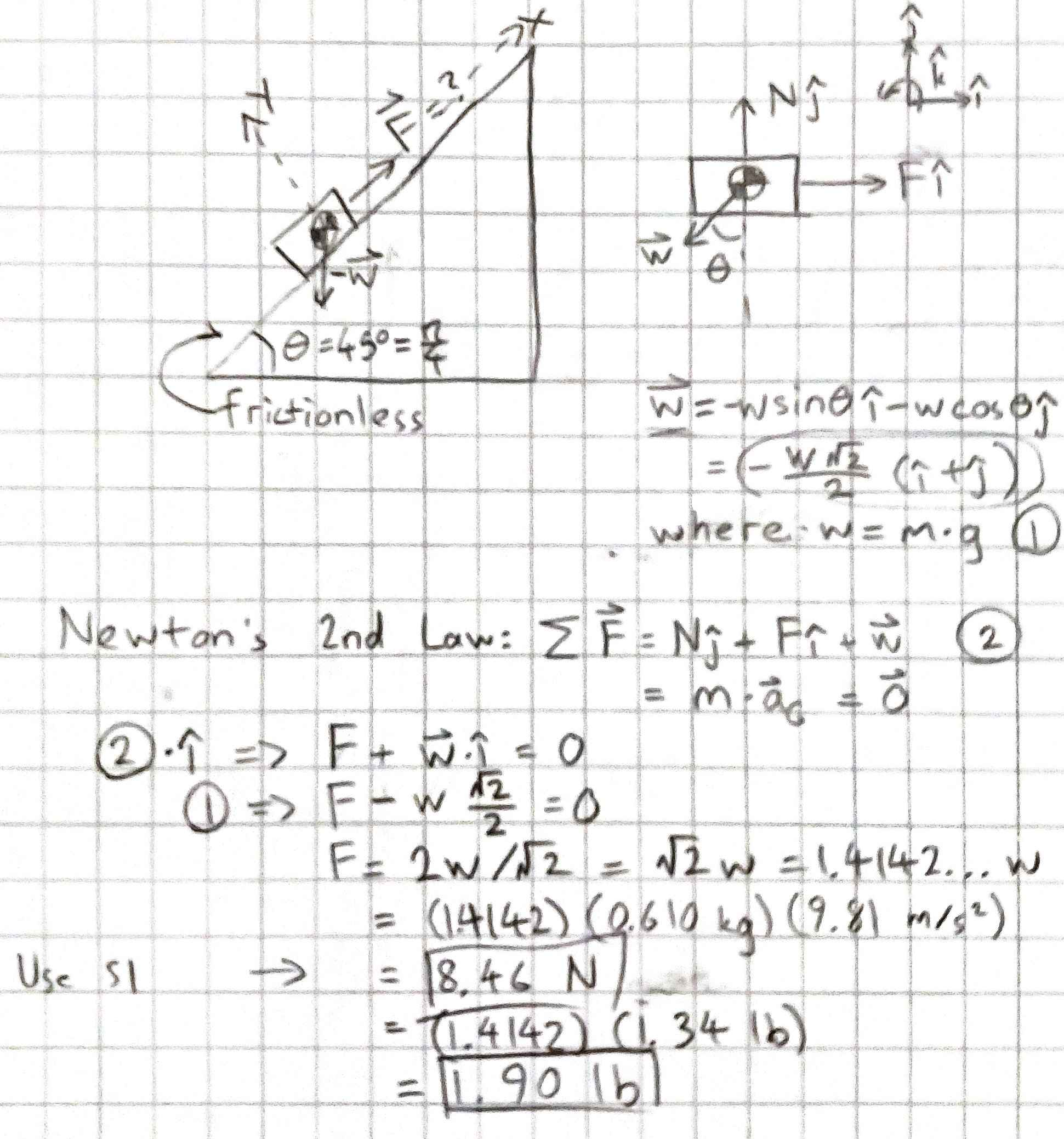
Control Design for Ideal Pendulum
Used control.place() to place eigenvalues in the left half-plane. Tried various combinations and chose a favorite.
Ran LQR to compute Kr. Tried various Q and R values and chose a favorite.
Results
Pole Placement
Using the following control code:
poles = np.array([-1, -2, -1.5, -3])
Kr = control.place(A, B, poles)
self.u = np.matmul(Kr, des_state - curr_state)
I achieved my first successful result, below:
Figure 1. It balances, but tracks input slowly. Poles placed to -1, -2, -1.5, -3.
I chose these poles rather arbitrarily, knowing they needed to be in the left half-plane or else the system would be unstable, and that a greater degree of control is needed for the rates of change than for the positions.
To achieve better performance, the poles must be farther in the left half-plane. I tried pushing the poles for zdot and thetadot farther in the LHP; increasing a couple times, the result was quite stable, but still drifted slowly:
Figure 2. Poles placed to -1, -14, -1.5, -15.
To see what would happen, I tried changing the position gains only, going back to the original poles for zdot and thetadot. As expected, the settling time is much quicker.
Figure 3. Poles placed to -10, -1, -11, -2.
Increasing all the gains at once (-10, -14, -11, -15), I expected to see a much stiffer pendulum with very quick response time (maybe unrealistically so). Instead, I saw a frozen animation and this error message:
/home/tim/.local/lib/python3.8/site-packages/scipy/integrate/odepack.py:247: ODEintWarning: Excess work done on this call (perhaps wrong Dfun type).
Run with full_output = 1 to get quantitative information.
warnings.warn(warning_msg, ODEintWarning)
On Campuswire, this error was interpreted to mean the poles cannot be placed that far into the LHP; the system goes unstable. (I miss my root locus diagrams from the frequency domain – they always help with these kinds of issues.) However, reducing the gains somewhat, I still achieved a very quick response without an error:
Figure 4. Poles placed to -10, -4, -11, -5.
In fact, the robot cannot move this quickly without flipping; there seems to be some significant ringing here. It took a few more tries to get a fast response which also looks reasonable. (This may still be faster than the robot can accelerate, or slower than it can move with deadband.)
Figure 5. Poles placed to -1.9, -2, -2.1, -2.5.
Chose [-1.9, -2, -2.1, -2.5] because the step response to a square wave appears fast, even with minimal movement; it appears to move as quickly as the robot reasonably can.
LQR
The following code stabilized the pendulum with reasonable results:
Q = np.matrix( [[1, 0, 0, 0],
[0, 1, 0, 0],
[0, 0, 1, 0],
[0, 0, 0, 1]])
R = np.matrix([1])
# Solve ARE (Algebraic Ricatti Equation)
S = scipy.linalg.solve_continuous_are(A, B, Q, R)
# Find Kr: the following line means R^-1 times B^T times S
Kr = np.linalg.inv(R).dot(B.transpose().dot(S))
#poles = np.array([-1.9, -2, -2.1, -2.5])
#Kr = control.place(A, B, poles)
self.u = np.matmul(Kr, des_state - curr_state)
Figure 6. System response with LQR-generated control matrix. Q=I and R=1.
- Increased the cost for x and
: these are the degrees of freedom the robot actually actuates.
- Dropped the cost for
and
- The pendulum is not directly actuated
- The cost would ideally be zero since there is theoretically no limit to how fast the pendulum could move.
- Increased R because
- The desired time constant is less than one second
- It appears that R=1 corresponds to τ=1.
Figure 7. It didn’t work the way I expected.
I quickly realized (especially after trying large values of R) that I had this backwards somehow. After watching a helpful YouTube video, I confirmed that I had reversed the functionality of Q and R.
- Set higher penalties for x and
- Set lower penalties for
- Increased the penalty R for the one actuator to 10
Figure 8. LQR with λ₁=10, λ₂=5, λ₃=100, λ₄=10 for Q; and λ=10 for R.
A bit more tinkering yielded good results which nearly matched the results of the pole placement tuning; at this point, the limiting factor is R. A lower R yields higher performance (as expected.)
Figure 9. LQR with λ₁=100, λ₂=10, λ₃=100, λ₄=10 for Q; and λ=50 for R.
Chose the above Q and R because I care little about the actual rates of change; I care that the angle is correct (since more movement means the pendulum is more likely to fall); and that the cart follows the reference input. I also care, almost as much as I care about reference tracking, that the robot does not accelerate too suddenly and flip. LQR allows me to tune for what matters most.
Control Design for Realistic Pendulum
Added deadband (the velocity threshold described above) and saturation (max velocity) to the simulation. Attempted to design an LQR controller.
Results
Added deadband and saturation effects by modifying the velocity as follows:
if zdot > maxVel: # maximum velocity to the right
ydot0 = maxVel
elif zdot < -maxVel: # maximum velocity to the left
ydot0 = -maxVel
elif zdot > threshold or zdot < -threshold: # deadband
ydot0 = zdot
else: # can't move slower than a certain speed
ydot0 = 0
Also ensured the acceleration term could not be nonzero if zdot goes too high in either direction:
if zdot > maxVel: # maximum velocity to the right
ydot1 = 0 # can't accelerate any more
elif zdot < -maxVel: # maximum velocity to the left
ydot1 = 0 # can't accelerate any more
The same, unmodified LQR controller still worked, but now it came to a full stop. The pendulum was balanced just right; what if the sensor readings were imperfect?
Figure 10. LQR with λ₁=100, λ₂=10, λ₃=100, λ₄=10 for Q; and λ=50 for R, with deadband.
Update: Saturation Mark Two
Added a maximum actuation force in addition to a maximum actuation velocity. This variable maxForce was defined as 8.46 (Newtons) in pendulumParam.py and imported to pendulumControllerDynamics.py.
# Maximum actuator force
if self.u > maxForce:
self.u = maxForce
elif self.u < -maxForce:
self.u = -maxForce
Since the LQR controller already minimizes actuator effort, I expected the results to look much the same.
Figure 10. LQR controller performance (same Q and R as previously) with force limit.
Though I achieved the same performance with LQR as with pole placement, the simulation did not work the same with pole placement and a force limit! Instead, the simulator ran its four CPU threads near 100% (as usual for unstable systems) and showed this:
Figure 11. “Best” pole-placement Kr controller with force limit.
This highlights an advantage of the LQR controller: it can achieve the same performance with less effort.
How slow can we go?
Slightly out of order, attempted to maximize the controller actuation penalty. Setting R to 50,000 gave a ridiculously slow-moving, but still balancing, controller. Even R=1 billion still balanced the pendulum, although with zero reference tracking.
Figure 12. LQR controller with R=50,000.
Figure 13. LQR controller with R=1,000,000,000.
After trying 1 trillion also, I do not believe there is an upper limit. LQR will always generate a stable controller, but it might not follow the reference.
Control Design for Sensor Noise
Added Gaussian sensor noise to the simulation. Attempted to design an LQR controller.
Results
The following code, added after y was unpacked, added normally-distributed sensor noise. The following numbers are about accurate for the gyro (at least before drift accumulates) but one meter is actually quite conservative for the accelerometer drift.
# Add Gaussian (normally distributed) sensor noise
z += np.random.normal(scale=1)
zdot += np.random.normal(scale=0.2)
theta += np.random.normal(scale=1*np.pi/180) # 1° standard deviation
thetadot += np.random.normal(scale=0.1*np.pi/180) #0.1°/s std. dev.
To improve the the code, defined these parameters in pendulumParam.py, imported them to pendulumControllerDynamics.py, and used the imported parameters.
Not surprisingly, the LQR control system no longer worked. Again, the pendulum hung downward, and odeint() could not finish:
/home/tim/.local/lib/python3.8/site-packages/scipy/integrate/odepack.py:247: ODEintWarning: Excess work done on this call (perhaps wrong Dfun type).
Run with full_output = 1 to get quantitative information.
warnings.warn(warning_msg, ODEintWarning)
Tried reducing each noise parameter to zero independently, and tried combinations of nonzero noise components. The simulation would only run with all noise parameters set to zero. So, my intended solution of reducing the noise standard deviation in x and by using time-of-flight sensors instead of odometry will not work; the small noise in θ and
also breaks the controller. This is true even for very small noise parameters such as σ=0.001° for θ.
B Real: Simulating a Bad Model
To simulate the impact of modeling errors, defined two sets of m1, m2, and b parameters and instructed the dynamical system to use the “real” values while the controller does not.
### pendulumParam.py ###
m1 = 0.03 # Mass of the pendulum [kg]
m1Real = 0.04
m2 = .610 # Mass of the cart [kg]
m2Real = 0.5
ell = 1.21 # Length of the rod [m]
g = -9.81 # Gravity, [m/s^2]
b = 0.78 # Damping coefficient [Ns]
bReal = 1
# ...
A = np.matrix([[0.0, 1.0, 0.0, 0.0],
[0.0, -b/m2, -m1*g/m2, 0.0],
[0.0, 0.0, 0.0, 1.0],
[0.0, -b/(m2*ell), -(m1+m2)*g/(m2*ell), 0.0]])
AReal = np.matrix([[0.0, 1.0, 0.0, 0.0],
[0.0, -bReal/m2Real, -m1Real*g/m2Real, 0.0],
[0.0, 0.0, 0.0, 1.0],
[0.0, -bReal/(m2*ell), -(m1Real+m2Real)*g/(m2Real*ell), 0.0]])
B = np.array([[0.0], [1.0/m2], [0.0], [1.0/(m2*ell)]])
BReal = np.array([[0.0], [1.0/m2Real], [0.0], [1.0/(m2Real*ell)]])
### runSimulation.py ###
ctrl = pendulumCnt(param=P, m1=P.m1Real, m2=P.m2Real, b=P.bReal, zref=ref.square)
These changes to the parameters did not noticeably affect the performance or the stability of the system.
Figure 14. LQR controller using A and B matrices based on faulty model parameters.
Tried other combinations of parameters (masses and damping all too heavy, all too light, etc.) I had to make the model very bad to destabilize the system – and it still balanced the pendulum!
Figure 15. LQR controller using m1 = 0.1×m1Real, m2 = 0.4×m2Real, b = 5×bReal.
The LQR controller is quite robust to bad models.
What causes the controller to fail?
An unstable controller is usually what cases the simulation to fail (per Campuswire). Thus, if the controller breaks, the simulation breaks.
This may be confirmed by setting an eigenvalue in the control.place() command to a positive number. Integration hangs, the computer begins to heat up, and either an error is thrown or the animation is not displayed a minute or more: the symptoms are consistent.
poles = np.array([-1.9, -2, 2.1, -2.5])
Kr = control.place(A, B, poles)
self.u = np.matmul(Kr, des_state - curr_state)
Factors that cause the controller to fail include:
- Poles in the right half-plane
- Inability to send the required control signal (due to deadband or saturation)
- Discontinuity in readings (e.g. random noise) which result in very large control responses
- Time delays or insufficient update time (a.k.a. right-half-plane zeros)
- Serious inaccuracy in model parameters (factors of 2 or more)
- Improper sensor calibration / drift / non-Gaussian noise
- Other unexpected factors:
- Vibration and non-rigidity of components
- Instability of the robot chassis (flipping and tipping)
- Bad electrical connections
- 1/f noise
Lab 12b
Note that most of the failure modes for the controller above boil down to bad state estimation! This lab intends to fix that problem.
Materials
- Computer, running Python 3.6 or higher, with these additional libraries:
Procedure
- Downloaded lab code
- Familiarized myself with code; test-ran the simulation.
- Programmed the code to output the observability matrix.
- Added my LQR controller from the previous lab to the Kalman filter code; debugged. Note: this controller included deadband and saturation.
- Chose normally distributed noise based on readings from the real XL and gyro.
- Tested Kalman filter with position discrepancy, measurement noise, and process noise.
- Tested Kalman filter with measurement & process noise plus modeling errors.
- Tested Kalman filter with measurement & process noise plus increased update time.
- Tested Kalman filter with both
and z feedback.
(Not necessarily in order.)
Results
New A and B matrices are calculated in the Kalman filter code because the Kalman filter exists in discrete time, while the original A and B for the system are for continuous time. This is why the A and B of the Kalman filter code are named Ad and Bd.
We directly measure only . This can be read off the C matrix:
#Measure one state only
C = np.array([[0.0, 0.0, 0.0, 1.0]])
since the state vector is
x = [z, zdot, theta, thetadot]
Thus, not only the true angle of θ, but also the position and its derivative must be estimated using only the pendulum gyroscope output!
However, the Kalman filter works well. Below is a screen capture of its performance with my LQR controller (including simulated deadband and saturation) from Lab 11:
Figure 1. LQG performance with no noise or error.
Indeed, the observability matrix for the system is not full rank!
# In runSimulation.py
O = control.obsv(A,C) # A and C are imported from pendulumParam.py
yn = ["is not", "is"]
RO = np.linalg.matrix_rank(O)
print("The observability matrix {} observable. Its rank is {}".format(yn[RO==4],RO))
print(O)
The observability matrix is not observable. Its rank is 3
[[ 0. 0. 0. 1. ]
[ 0. -1.05676738 8.50616448 0. ]
[ 0. 1.35127632 -0.50984695 8.50616448]
[ 0. -10.71689863 73.00676954 -0.50984695]]
Thus, z cannot be estimated from this data since the robot could start anywhere and even be moving while the pendulum is balanced. Since a perfectly balanced pendulum requires no acceleration of the cart, the velocity could be nonzero without affecting the tilt of the pendulum.
I chose to use 5°/s as the gyroscope (θ) standard deviation, due to periodic up-and-down drift I encountered in Lab 6 and following. This is conservative since I rarely observed this much drift even after a bad calibration; yet it is less than the default Σ.
sigma_n = np.diag([5*np.pi/180])
As for the process noise, since the cart velocity is controlled directly, its process noise is relatively low at 0.1 m/s. However, the position error is 0.5 m due to the difficulty of open-loop control; the errors in θ and are also larger at 0.5 each since they must be estimated.
sigma_u = np.diag([0.5, 0.1, 0.1, 0.1])
Figure 2. With increased Σ values in the prediction step, the Kalman filter performed nearly the same as before.
Offset
Adding 0.5 m to the initial z offset the entire simulation. The Kalman filter did not converge to the correct position, as expected since the z state is not observable. Added the following line to runSimulation.py.
states[0][0,0] += 0.5 # start out in the wrong place
Changing the actual initial state adds an offset to the estimation because the Kalman filter only receives y (as measured) and u as inputs. It does not see the actual x state vector.
Figure 3. The simulated Kalman filter does not know it’s wrong.
Adding errors to the other states generated more fun results. converged very quickly, as it is measured directly.
Figure 4. Starting offset to .
Surprisingly to me, an error in θ also converged quickly.
Figure 5. Starting offset to θ.
Lastly, a starting error in had odd results, but still converged. Again, z is not observable, so the consequence was a permanent error in z.
Figure 6. Starting error in .
Noise
# in pendulumNonlinearDynamics.py
dydt = np.array([[ydot0 + np.random.randn()*0.01],
[ydot1 + np.random.randn()*0.01],
[ydot2 + np.random.randn()*0.01],
[ydot3 + np.random.randn()*0.01]]) # default values
This addition of process noise the following result:
Figure 7. Small (0.01 each) process noise.
The Kalman filter (and better simulation code) allowed the simulation to run without crashing or going unstable in the presence of some noise.
However, adding in the noise values I estimated from the results of Labs 6-10:
# in pendulumNonlinearDynamics.py
dydt = np.array([[ydot0 + np.random.randn()*0.5], # 1/2 m noise
[ydot1 + np.random.randn()*0.25], # 1/4 m/s noise
[ydot2 + np.random.randn()*0.174], # 10 deg noise
[ydot3 + np.random.randn()*0.087]]) # 5 deg/s
Figure 8. Realistic, maybe conservative, process noise values.
The pendulum still balanced. Note, again, that saturation and deadband values have been present the whole time.
Figure 9. Realistic sensor noise value, conservative process noise
Note that the process noise for the pendulum may be unrealistically high, since the noise estimate came from the sensor noise. A real pendulum does not move very much. So, I decreased the θ and process noise for the remainder of the lab.
# in pendulumNonlinearDynamics.py
dydt = np.array([[ydot0 + np.random.randn()*0.5], # 1/2 m noise
[ydot1 + np.random.randn()*0.25], # 1/4 m/s noise
[ydot2 + np.random.randn()*0.087], # 5° noise
[ydot3 + np.random.randn()*0.035]]) # 2°/s
Model Error
Adjusting A and B had similar effects to a constant offset. I adjusted the diagonal values of A and all the values of B by random constants.
# In kalmanFilter.py
A = P.A
B = P.B
for i in range(4):
A[i,i] += np.random.randn()*0.05
B[i,0] += np.random.randn()*0.05 # add one-time random error to A, B
Ad = scipy.linalg.expm(A*P.T_update)
Bd = B*P.T_update
Figure 10. A and B randomly adjusted. Here, the noise is still present, so it’s hard to tell the difference between this and the sensor noise.
Figure 11. A and B randomly adjusted, with model noise doubled. No process noise this time.
Figure 12. A and B randomly adjusted, with model noise 0.5. No process noise. That was too much.
Failing parameters:
Real A and B:
[[ 0. 1. 0. 0. ]
[ 0. -1.27868852 0.48245902 0. ]
[ 0. 0. 0. 1. ]
[ 0. -1.05676738 8.50616448 0. ]]
[[0. ]
[1.63934426]
[0. ]
[1.35482997]]
A and B with noise:
[[ 0.40827072 1. 0. 0. ]
[ 0. -2.00623195 0.48245902 0. ]
[ 0. 0. -0.18767243 1. ]
[ 0. -1.05676738 8.50616448 0.75239143]]
[[-0.15350993]
[ 1.74622768]
[ 0.31944639]
[ 1.18057743]]
Still stable:
Real A and B:
[[ 0. 1. 0. 0. ]
[ 0. -1.27868852 0.48245902 0. ]
[ 0. 0. 0. 1. ]
[ 0. -1.05676738 8.50616448 0. ]]
[[0. ]
[1.63934426]
[0. ]
[1.35482997]]
A and B with noise:
[[-0.13277644 1. 0. 0. ]
[ 0. -1.69628804 0.48245902 0. ]
[ 0. 0. 0.22684797 1. ]
[ 0. -1.05676738 8.50616448 0.07961173]]
[[-0.15261747]
[ 1.62024987]
[ 0.13437356]
[ 1.55003769]]
LQG is quite robust to modeling error. It took about 50% added random error to destabilize the controller, and 30% random error (0.3 std. dev.) did not destabilize it. Also note that increasing the sensor standard deviation in the Kalman filter made it converge faster.
Returning the model error to a small nonzero value, and the process and measurement noise to realistic values, increasing T_update to only 2 ms made the controller horizontally unstable.
Figure 13. T_update increased from 0.001 to 0.002.
At this point, the process and sensor noise had to be lessened for the system to remain stable. I had accidentally set the sensor noise to 0.5 rad/s (forgetting units) so changing it to 5°/s, the controller remained stable for T_update = 0.002 s. Any more than this, and the controller destabilized. I cannot reasonably decrease the process or sensor noise values any more considering my experience.
Figure 14. 2 ms is the longest T_update even with improved noise parameters.
# In runSimulation.py (in loop)
y_kf += np.random.randn()*0.04 # ±2° gyro noise
# In pendulumNonlinearDynamics.py
dydt = np.array([[ydot0 + np.random.randn()*0.25], # 1/4 m noise
[ydot1 + np.random.randn()*0.1], # 0.1 m/s noise
[ydot2 + np.random.randn()*0.087], # 5° noise
[ydot3 + np.random.randn()*0.009]]) # 0.5°/s
return dydt
Update: I was increasing Ts, the simulation sample time, not T_update. Fixing this fixed the problem.
Figure 14. LQG with one DoF is quite shaky. T_update = 20 ms.
Saturation is not an issue here because the noise is being added to the process, not the sensor. In real life the process noise would change continuously, but the simulation picks discontinuous random variables. To make the simulation look more realistic, I reduced the process noise. It worked even with a 50 ms sample rate.
Figure 15. LQG with one DoF, finally unstable at T_update = 100 ms. Process noise is reduced.
More measurements
I would like to measure the z position as well as since controller went unstable in z before θ. Using a ToF sensor gives a second value in y with sensor noise of about 0.001 m.
# In runSimulation.py loop
y_kf[0,0] += np.random.randn()*0.001 # ±1mm ToF noise
y_kf[1,0] += np.random.randn()*0.04 # ±2°/s gyro noise
# In pendulumParam.py
# Measure theta dot and z
C = np.array([[1.0, 0.0, 0.0, 0.0],[0.0, 0.0, 0.0, 1.0]])
# In kalmanFilter.py
sigma_u = np.diag([0.1, 0.1, 0.1, 0.1]) # less std. dev. for position control
sigma_n = np.diag([0.001, 5*np.pi/180]) # 2-D now
I was then able to decrease the process noise for z and zdot respectively, since these can now be position-controlled.
The controller was solid at 10 ms with reasonable noise (as shown above), and not terribly shaky at T_update = 20 ms.
Figure 16. LQG with the ability to sense z. T_update = 20 ms (50 Hz measurement rate, close to the maximum sample rate of the real sensor.)
I thought this observer would behave better at large T_update than the one-DoF observer, but at 50 ms, it appears unstable. At T_update higher than 50 ms, it becomes obviously unstable. My hypothesis is that this occurs because the controller corrects too much for changes in x now that they cannot be attributed to noise.
Figure 17. LQG, with two sensors, at the borderline of stability.
A better way to implement this is to measure z once every 100 ms (close to the real sampling rate)
Conclusion
Although LQG works well in simulation, even at fairly slow sampling rates, it will not work as well in real life due to slosh and nonlinearities in the drivetrain. These things are more difficult to model. And, as the above examples show, the sample rate is very important. A high sample rate is difficult to achieve with Bluetooth communication, so Bluetooth would likely have to be disabled.